using KaTeX
Original author: Michal Švagr
Maintaner: Filip Štěpánek
Citát
Ano je to těžké, ale život je těžký.
prof. Dr. Ing. Zdeněk Hanzálek (2021)
KO
ILP
- a - proměnné řešení
- - pomocné reálné proměnné
- - pomocné celočíselné proměnné
- - pomocné binární proměnné
- - velké číslo
- Absolutní hodnota
- Absolutní hodnota
- Liché číslo
- AND
- OR
- XOR
- (Implikace)
-
- Vypínání
- vybírání ze dvou:
- - zapnutá při
- vybírání z více:
- - přesně dvě (znaménko dle potřeby)
- vybírání ze dvou:
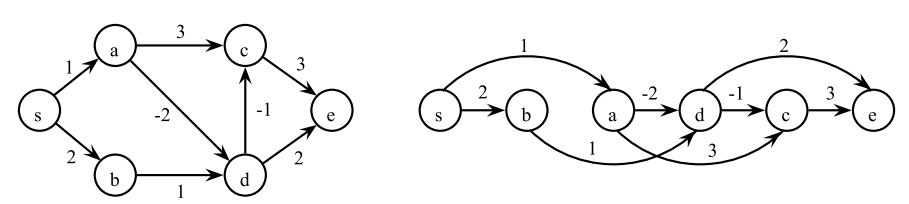
SP
- SP (Shortest Path)- nejkratší cesta z do
- SPT (Shortest Path Tree) - nejkratší cesty z do všech ostatních (out-tree)
- In-tree - nejkratší cesty ze všech do jednoho bodu (otočíme hrany v SPT)
- All Pair Shortest Path - nejkratší cesty mezi všemi vrcholy
- Nejdelší cesta - obrátíme ceny hran
- Když maj nody váhy - rozdvojím je a vytvořím orintovanou hranu s váhou
- MST (Minimal Spaning Tree) - nejlevnější propojení všech nodů
- Je rozdíl, když dělám MST a SPT! Cesty jsou často různé
- Steiner Tree - nejlevnější propojení vysílače s příjmači v síty
- Nalézt SP v grafu se zápornými cykli je NP-hard
- Bellman-Ford a Floy podporují negativní hrany
- Sled (Edge progression) - posloupnost vrcholů a hran
- Cesta (Path) - neopakují se ani vrcholy ani hrany
- Když nejsou negativní cykly - nejkratší sled je i nejkratší cesta
- Když nejsou negativní váhy - nejkratší sled obsahuje i nejkratší cestu
- - počet vrcholů
- - počet hrans
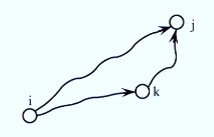
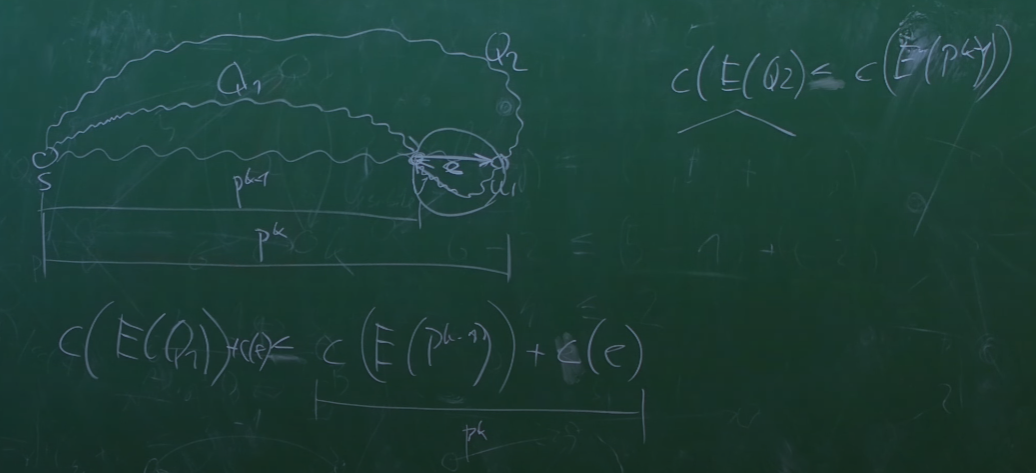
Troúhelníková nerovnost
- je suma cen v nejkratší cestě
- je suma cen v cestě
- Platí, že:
Negativní cykly
- Rozbijí nám algoritmy
- Proto je nejkratší cesta s negaitvními cykly NP-Hard
- Pozor musíme dávat, když otáčíme ceny pro problém nejdelších cest
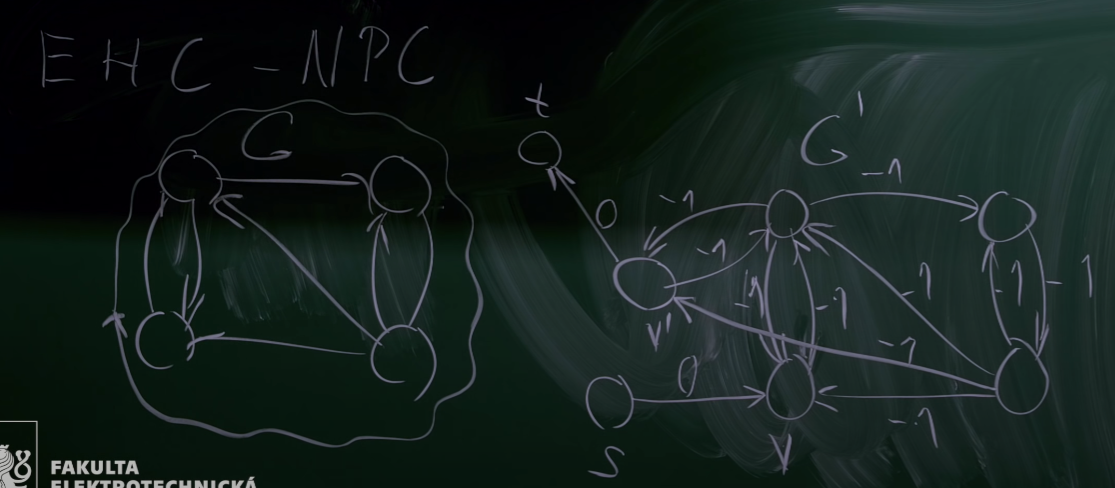
- Důkaz:
- Dokazujeme přes redukci existence hamiltonovksého cyklu (EHC) na STP
- EHC = Máme orientovaný graf s cykly a hledáme cyklusm který prochází všemi vrcholy právě jednou
- Postup redukce:
- Zkopírujeme graf G a přidáme všem hranám váhu -1
- Zduplikujeme libovolný vrchol a zkopírujeme i jeho hrany k novému vrcholu
- Přidáme zdrojový vrchol a propojíme ho s vrcholem s cenou 0
- Přidáme cílový vrchol a propojíme ho s kopiíí vrcholu s cenou 0
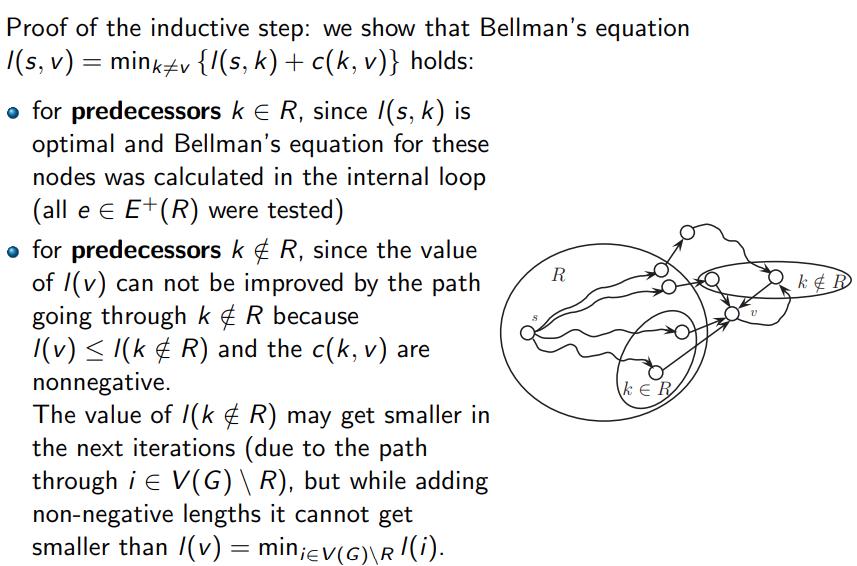
Bellmanův princip optimality
- Jestliže máme nekratší cestu z do přes pak cesta z do je také nejkratší stejně tak z do
- Belmanova rovnice je trojůhelníková nerovnost s cenami cestami místo vzdáleností
- Jinými slovy, nejkratší cesta se skládá ze segmentů nejkratších cest
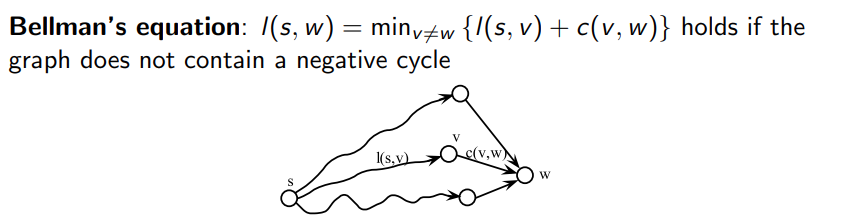
- Důkaz sporem:
-
- Máme nejkratší cestu z , která vede přes , tak, že existují hrany a
- Uvažujme cestu takovou, že její cena je menší než cena cesty (v,w)
- To je spor s tvrzením, že je nejkratší cesta
- (tohle je možná blbě)
- Uvažme další cestu , která prochází skrze takovou, že její cesta je kratší než cesta
- To je opět spor s tím, že je nejrkatší cesta
-
Algorithm for DAGs
- Skoro jako Bellman-ford
- Vrcholy očíslujeme tak aby menší vždy ukazoval jen na větší
- Postupně bereme vrcholy od prvního po poslední
- Využíváme vlastnosti, že vše co je předemnou už má minimum, takže stačí koukat jen na hrany co do mě vstupují
Dijkstra Algorithm
- Pouze nezáporné ceny hran
- nebo s priority queue
- algo:
- V grafu vrcholům přiřadím hodnotu a startu hodnotu 0
- Založíme množinu což je množina, ve které jsou nejkratší cesty
- Vybereme z množini vrcholů mimo ten s nejmenší hodnotou a vložíme ho do
- Pro všechny hrany vystupující z nastavíme hodnotu vrcholů na opačné straně hrany (mimo ) na (původní hodnota , hodnota + cena hrany)
- Pokud existuje vrchol mimo množinu vracíme se do bodu 3
- Příklad: https://youtu.be/LCTwYILbmEY?t=991
- Důkaz (indukcí):
- Pro tak platí minimum, protože je tam jen start za cenu 0
- Pomocí belmana dokážu, že vrchol, který přidávám do je segmentem nejkratší cesty
- Jinými slovy, mám nejkratší cestu a přidávám vrchol , protože má ze všech možných cest z nejmenší cenu. Proto vzniklá cesta je opět nejkratší protože neexistují hrany se zápornou váhou.
- https://youtu.be/LCTwYILbmEY?t=1658
- Raději přijládám slide z přednášky
A*
- Když hledáme jen cestu z bodu do bodu můžeme ji zrychlit tak, že ukončíme vyhledávání, když dorazíme do bodu
- Navíc můžeme přidat další informace (informed search), “jakým směrem” se bod nachází
Bellman-Ford Algorithm
- Umí detekovat záporné cykly (ve vnitřní smyčce kontrolujeme trojúhelníkovou nerovnost)
- Lze řešit dynamickým programováním
- Algoritmus:
- V grafu vrcholům přiřadím hodnotu a startu hodnotu 0
- Naincializuji si
- Projdu všechny hrany v grafu a vždy s zeptám zda nezlepším pomocí hodnoty + ceny hrany
- Zvětším =
- Pokud (kde je počet vrcholů) a zároveň jsem v bodě 3 vylepšil alespoň jednu hranu vracím se do bodu 3
- Příkald 1: https://youtu.be/LCTwYILbmEY?t=6558
- Příklad 2: https://youtu.be/LCTwYILbmEY?t=7823
- Důkaz (indukce):
-
Vychází z Bellmanova principu optimality
-
Po prvním kroku (vnější smyčky) budu mít nejkratší cestu do vrcholu nejkratší cestě s 1 hranou
-
Každá další krok tento vztah stále platí jen se zvyšuje počet hran a to právě z bellmana
-
Platí
- je label vrcholu po iteracích
- je nejkratší možná cesta s maximálně hranami
- je cena cesty
-
DAG
- Directed acyclic graph
- Graf můžeme topologicky uspořádat tak, že vždycky ukazuje pouze na následníky, nikoli na předky
- Užitečné například pro časové osy
- Můžeme efektivně procháze modifikovaným Bellman-Fordem v lineárním čase
- Složitost
Floyd Algorithm
- Umí detekovat záporné cykly (na diagonále se objeví záporné číslo)
- Na diagonále máme nejkratší cykly, které procházejí daným vrcholem
- Hledá All Pair Shortest Path
- Algoritmus:
- Nainicializujeme matici s hodnotami dle vah hran, na diagonále a zbytek
- Nainicializujeme matici s hodnotami matice parentů
- Máme 3 vnořené smyčky od 1 do s proměnnými (vnější), (prostřední) a (vnitřní)
- V uplně vnitřní smyčce máme podmínku na zlepšení pokud pak nastavíme a
- Příklad: https://youtu.be/eFLIzXDeJ6U?t=3518
Johnson’s algorithm
- Počítá All Pair Shortest Path
- Dobrý na řídké grafy
- Kombinuje Dijkstru a Bellman-Ford
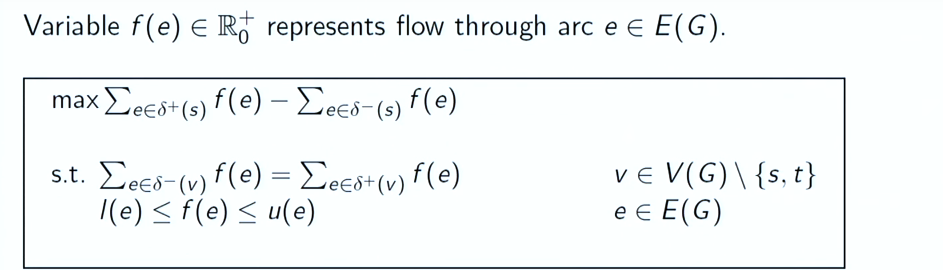
FLOW
https://rtime.ciirc.cvut.cz/~hanzalek/KO/Flows_e.pdf
- Zadáno jako (G, l, u, s, t):
- G - orientovaný graf
- l - lower bound hran
- u - upper bound hran
- s - startovní vrchol
- t - koncový vrchol
- Co vteče musí vytéct z vrcholu - 1. Kirchoffův zákon
- Max flow - maximalizuje bilanci s
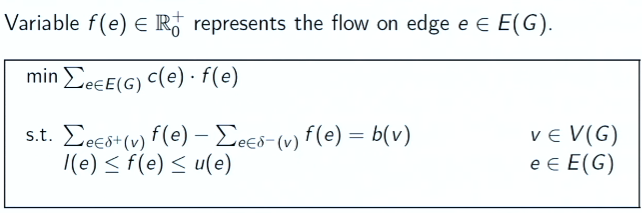
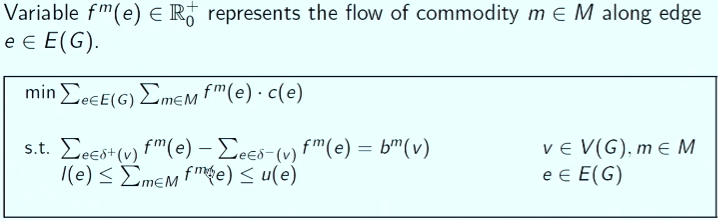
LP zadání
Balance
- Hodnota na vrcholu
- Spočítaná jako flow výstupní hran - flow vstupních
- Součet: balance + flow vstupní hran - flow výstupních = 0
- s má balanci > 0 a t balanci < 0
- Součet všech balancí v grafu je 0
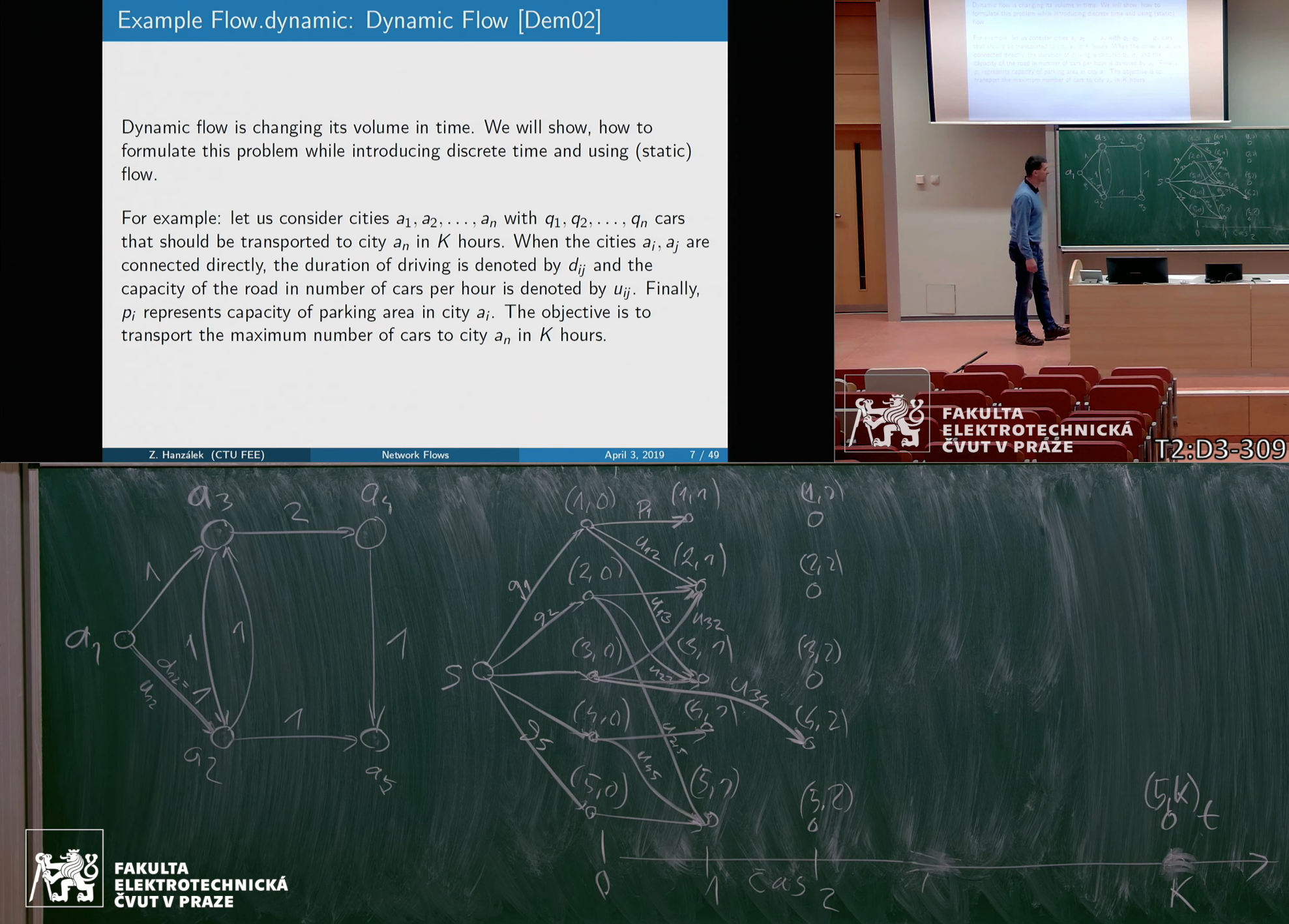
Dynamické flow
- Můžeme přidat čas
- Chceme kumulovat tok na nodech (např. ropa v tankerech, parkoviště)
- Lze převést zpět na max flow (zavedením duplicitních nodů v různých časech)
Min-cut
- Může existovat více ekvivalentních cutů
- Množina vrcholů obsahující s ale nikoliv t
- Hrany vedoucí z množiny cutu jsou plně sarurované ( flow = u ) a hrany vedoucí do množiny jsou také plně saturované ( flow = l )
- Kapacita cutu = maximální flow
Ford-Fulkerson (Max-Flow)
- Obecně řečeno nestačí maximalizovat všechny toky hrany, musíme na to jít chytřeji (nechceme např. maximallizovat hranu vedoucí do s) => proto Ford-Fulkerson
- Vytvoření proveditelného toku
- Pokud jsou všechny lower boundy nulové, neboli ∀e ∈ E(G); l(e) = 0 můžu jít do kroku 2. s initial flow = 0
- Pokud nejsou všechny lower-boundy nulové:
- Vytvoříme cirkulaci (vytvoříme hranu z t do s s l=0 a u=∞)
- Spočítám balance (pozor, tyto balance jsou odlišné od výše zmíněných!) (l vstupních - l výstupních) a snížím hodnoty l a u o l
- Přidám nový s’ od kterého povedeme hrany do vrcholů s balancí > 0 s l = 0 a u = balanci
- Přidám nový t’ do kterého povedeme hrany z vrcholů s balancí < 0 s l = 0 a u = -balanci
- Zapnu max-flow na novém grafu
- Výsledné new-flow zadám do starého grafu jako flow = l + new-flow
- Inkrementální zlepšování
- Nejdříve najdeme cestu od s do t takovou, že každá hrana v cestě není plně saturovaná (je možná použít zpetné hrany)
- Této cestě zvýšíme (snížíme v opačných hranách) tok o maximální možné zlepšení (min z možných zlepšení jednotlivých hran cesty)
- Opakuji dokud jsem ještě schopen najít zlepšující cestu z s do t
- Time complexity:
- Celočíselné flow (znamená celočíselné l a u)
- obecně - O(|E|2 * U) kde U je maximum z u
- Alternativně použijeme algoritmus Floyd-Warshall
- Při vytváření augmentované cesty použijeme algoritmus pro nejkratší cestu - O(|E|2 * |V|)
- Celočíselné flow (znamená celočíselné l a u)
Celočíslenost Ford-Fulkersona
- Když všechny kapacity l a u jsou celá čísla (integery), kapacita augmentované cesty γ při běhu Forda-Fulekrsona je rovněž celé číslo
- Protože máme nax-flow konečné hodnoty, existuje konečný počet kroků algoritmu
- Rovněž z LP formulace můžeme říci, že celočíselnost vyplývá z úplné unimodularity matice incidence grafu G, což je matice A ve formulaci A - x ≤ b.
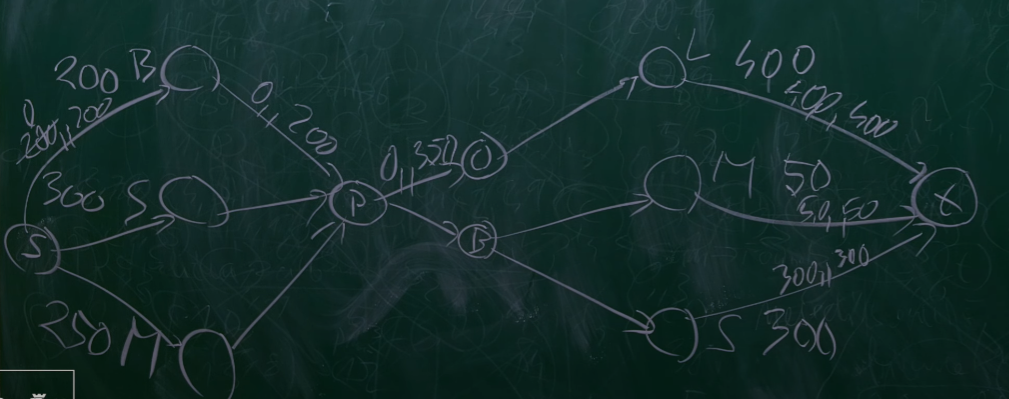
Feasible Flow with Balances
- Zadáno jako (G, l, u, b):
- G - orientovaný graf
- l - lower bound hran
- u - upper bound hran
- b - balance vrcholů (suma všech balancí = 0)
- Derivát tokové sítě, ale máme více zdrojů a více cílů
- Decision problém - ptáme se, jestli lze dosáhnout toku
- Tento problém lze polynomiálně redukovat na problém mac flow
- Přidáme nový zdroj s’ a spojíme ho s původními zdroji a nastavíme l=u=b (jinými slovy nastavíme lower bound a upper bound na balanci uzlu)
- Přidáme společný spotřebič t’ a spojíme ho s původními spotřebiči a nastavíme l-u-b (jinými slovy nastavíme lower bound a upper bound na balanci uzlu)
- Pokusíme se vyřešit max-flow.
- Existují-li toky pak lze použít zadané balance a rozhodovací úloha má odpověď ano.
Minimum cost flow
- Každá hrana má cenu c
- Přenesení jedné jednotky po dané hraně nás stojí právě c
- Hledáme maximální tok při minimálním costu
- Zadáno jako (G, l, u, c, b):
- G - orientovaný graf
- l - lower bound hran
- u - upper bound hran
- c - cost hran
- b - balance vrcholů (suma všech balancí = 0)
- Max flow můžeme polinomiálně redukovat na minimum cost flow
- Přidáme cirkulaci = přidáme hranu z t do s, kde u=∞ a l=0 a c=-1
- Cenu všech ostatních hran c nastavíme na 0
- Balanci všech vrcholů b nastavíme na 0
- Maximalizujeme cenu
- Shortest path můžeme polynomiálně redukovat na min cost flow
- Použijeme LP formulaci min-cost flow
- Nastavíme b(s)=1 a b(t)=-1
- Pro všechny ostatní (t.j. mimo zdroj a spotřebič) b(v)=0
- l(e)=0 a u(e)=∞ pro všechny hrany e
- Získáte (primární) LP formulaci problému nejkratší cesty (viz příklad zcela unimodulární matice A v přednášce o ILP) #Tady nemám sebemenší tušení co tohle znamená, lol
- Chinese mailman problem můžeme polynomiálně redukovat na min cost flow (#bylo to v testu, tak se na to nevykašlete 🙃)
- Listonoš musí zajít na poštu, vzít dopisy a obejít s nimi všechny ulice města a nakonec se vrátit do výchozího bodu – zpět na poštu. Musí přitom urazit minimální vzdálenost.
- V grafu, který reprezentuje město, představují hrany grafu ulice a uzly odpovídají křižovatkám. Hrany jsou ohodnoceny kladnými čísly, které odpovídají délce ulic.
- Postup:
- Nastavíme b(v)=0 pro všechny vrcholy
- Nastavíme l(e)=1 a u(e)=∞ pro všechny hrany
- Vyřešíme min flow
- Existuje pošťákova cesta, která využívá každou hranu přesně jednou (tj. Eulerian walk) iif pokud má každý vrchol stejný indegree a outdegree (tj. Eulerian digraph).
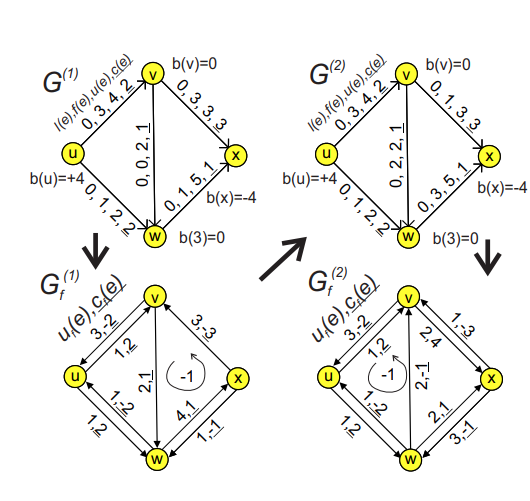
Cycle Canceling Algorithm (řeší Minimum cost flow)
- Najdeme feasible flow graf
- Vytvoříme residuální graf
- Hrany v grafu zdvojíme
- Dopředné hrany budou mít hodnoty u = u - flow a c = c
- Zpětné hrany budou mít hodnoty u = flow - l a c = -c
- Vyházím hrany s u = 0
- Hrany v grafu zdvojíme
- Naleznu záporný cyklus (záproný součet cen)
- γ = součet cen * min(u) v cyklu
- Upravíme flows v původním grafu o γ aby to dávalo smysl (neporušil jsem kirchofa)
- Znovu jdu do bodu 2. dokud existuje negativní cyklus v residuálním grafu
- Time complexity - kde U je maximum z u a C maximum z c
Minimum cost multicommodity flow
- Přidává různé typy přenášených informací (které nesmíme pomotat)
- Každý vrchol má balance jednotlivých typů
- Každý vrchol musí splňovat kirchofův zákon pro jednotlivé komodity
-
- Zadáno jako (G, l, u, c, b1…m):
- - orientovaný graf
- - lower bound hran
- - upper bound hran
- - cost hran
- - vektor znázorňující balanci pro jednotlivé komodity (v součtu musí dávat 0 přes celý graf a komodity)
- Zadáno jako (G, l, u, c, b1…m):
- Cíl minimalizovat
Párování
- Maximum Cardinality Matching Problem
- Párování s největším počtem hran (spojení)
- Algo - M-alternig Path
- Najdeme náhodné párování
- Najdeme alternující cestu (cesta na které se střídá nevybraná hrana s vybranou, začíná a končí nevybranou hranou a koncové vrcholy nepatří žádnému párování)
- Prohodíme vybrané a nevybrané hrany v cestě
- Opakujeme 2-3 dokud neexistuje alternativní cesta
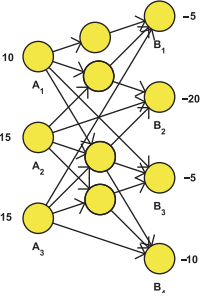
- Maximum Cardinality Matching in Bipartite Graphs
- Párování s největším počtem hran (spojení) párující vrcholy ze dvou skupin
- Lze řešit pomocí max-flow
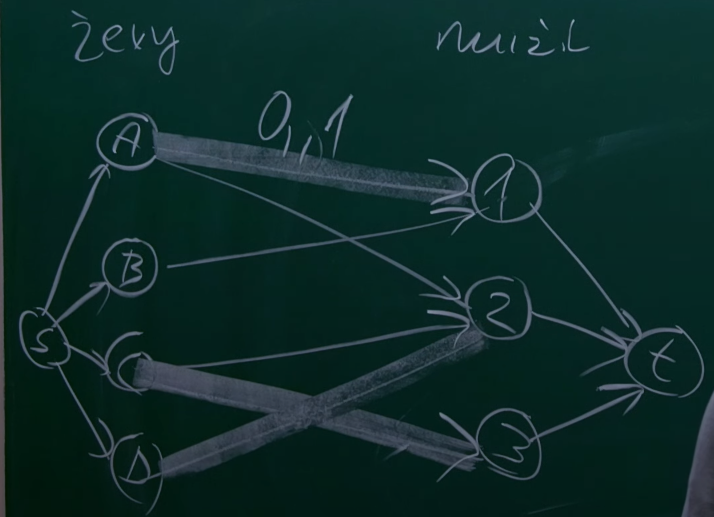
- Minimum Weight Matching in a weighted graph
- Takové párování co nám dá nejmenší součet cen na hranách
- Minimum Weight Perfect Matching
- Takové párování co nám dá nejmenší součet cen na hranách a všechny vrcholy jsou napárované
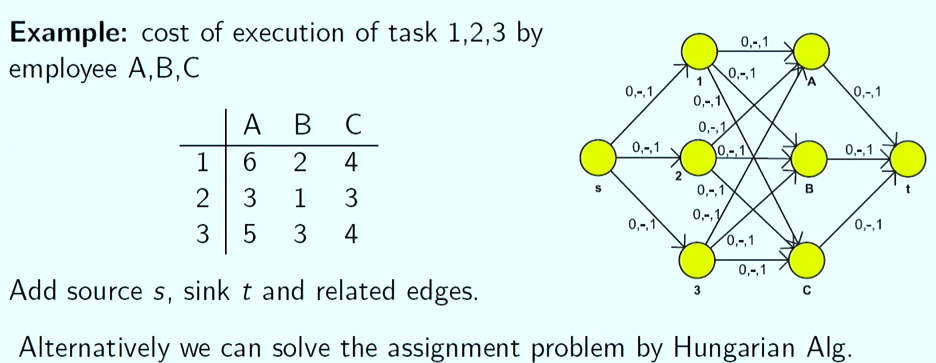
- Známé jako assignment problem
- Lze převést na min cost flow podobně jako bipartitní párování
Knapsack
- NP-Hard, ale ne moc (existují kvalitní aproximační algoritmy)
- Je zadán jako:
- = počet předmětů
- = cena předmětu
- = váha předmětu
- = nosnost batohu (nesmí být překročena)
- předmět buď vložíme nebo nevložíme do batohu
- Maximalizujeme cenu věcí v batohu
Fractional Knapsack problem
-Stejné jako knapsack, ale předměty nemusíme vkládat celé
- Řeší: bin packing, contaner loading, 1-D, 2-D, 3-D cutting problem.
- jen znovu seřadím
- Algoritmus:
- Pokud vložíme vše a máme hotvo
- Vyřadíme předměty s
- Přeindexujeme předměty podle od největšího po nejmenší
- Postupně dáváme předměty do batohu dokud se nám tam další předmět nevejde celý
- Tento předmě označíme jako
- Do batohu dáme takovou čás , která se do něj ještě vejde
R-aproximační algoritmus
- Takový algoritmus , který je definován číslem pro problém
- Výsledek algoritmu je maxilmálně hodnoty optima algoritmu
- Pro maximalizaci
- Pro minimalizaci
- Frekvence “worst case scenaria” není sledována
Knapsack (0/1 Knapsack)
2-Aproximation algorithm
- Alespoň optima (kde =2)
- Algoritmus:
- Pokud vložíme vše a máme hotvo
- Vyřadíme předměty s
- Přeindexujeme předměty podle od největšího po nejmenší
- Postupně dáváme předměty do batohu dokud se nám tam další předmět nevejde celý
- Tento předmě označíme jako
- vložíme předměty nebo jen na základě toho, co je výhodnější
- Důkaz, že
- Můžeme vynechat předměty, jejichž
- Když , tak máme optimální řešení
- Protože je horním omezením optimální hodnoty, lepší z dvou možných řešení a je minimálně polovina optimální hodnoty
Dynamic programing
- Pseudopolynomiální
- kde je velmi veliké číslo
- 2 varianty: máme celočíselné ceny, máme celočíselné váhy
- Celočíselné hodnoty napíšeme do sloupců, řádky budou indexy předmětů pro vložení a hodnoty jsou neceločíselné valstnosti
- Tabulky: https://youtu.be/71B1FMVVX_o?t=7252
- Lze zmenšit počet sloupců (zrychlit algo) nalezením dělitele ve tvaru (pokud se nejedná o společného dělitele snižujeme přesnost řešení)
Aproximační schéma
- Mějme zadaný knapsack a (o kolik jsme ochotni být vzdáleni od optima v procentech)
- Postup:
- Spustíme 2-aproximační algoritmus a řešení označíme jako
- Spočítáme proměnou
- Spočítáme
- Spustíme dynamické programování s pozměněnými cenami s upper boundem
- Vrátíme vyšší cenu z a
TSP
- Cesta v grafu přes všechny vrcholy grafu - Hamiltonovská cesta
- Spojení posledního a prvního vrcholu - Hamiltonovská kružnice
- Reálné problémy TSP: Capacitated Vehicle routing Problem, Time Windows, Pick-up and Delivery.
- EHC - existence hamiltonovské kružnice (circuit)
- Existuje kružnice, která prochází všemi vrcholy právě jednou?
- Neorintovaný graf (obecný)
- Rozhodovací problém - NP-Complete
- Podobně existence hamiltonovského cyklu - v orientovaném grafu
- TSP - traveling salesman problem
- Naleznout hamiltonovskou kružnici s minimální váhou
- Symetrické TSP - v neorientovaném grafu
- Asymetrické TSP - v orientovaném grafu
- Optimalizační problém - NP-Hard
- Počet hamiltonovských kružnic =
- Ale nevíme proč je to tak těžký (jakože to neví ani Hanzálek), MSTs je ještě víc
NP-Hard problémy
- NP-Hard problémy
- Neumíme najít polynomiální algoritmy
- Řešitelné pseudopolynomiálním algoritmem (e.g. dynamické programování)
- Složitost se pronásobuje konstantou, která souvisí s nějakým parametrem grafu (e.g. součet vah objektů u Knapsacku)
- Silně NP-Hard problémy
- Neumíme na ně najít pseudopolynomiální algoritmy (e.g. dynamické programování)
- Nepomůže nám omezit parametry vstupu polynomem - stále zůstává NP-Hard
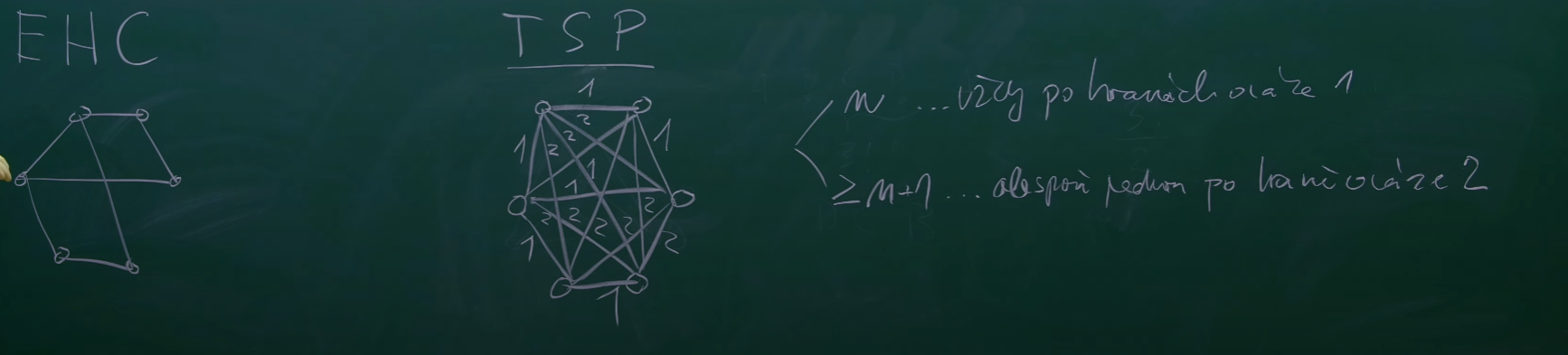
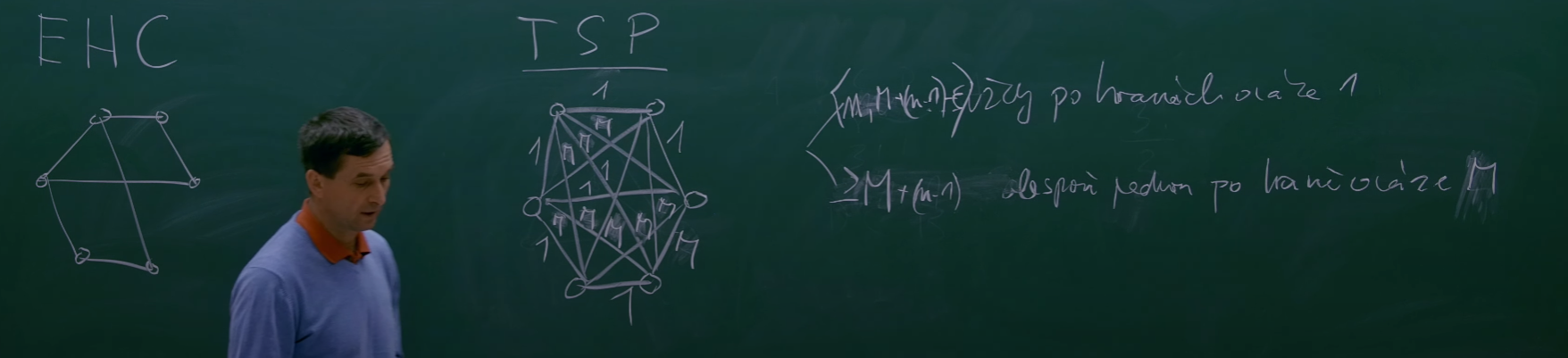
Důkaz, že TSP je silně NP-Hard
- Mějme:
- (t.j. omezení na váhy hran 1 a 2)
- Dokazujeme, že i když takto omezíme váhy hran, problém je stále NP hard a proto je silně NP-Hard
- Použijeme polynomiální redukci z existence hamiltonovské kružnice
- Postup:
- Vezmeme neoritovaný graf s vrcholy
- V tom najdeme libovolnou hamiltonovskou kružnici
- V grafu ohodnotíme každou hranu z váhou 1 a ostatní hrany váhou 2
- má hamiltonovskou kružnici iif optimální TSP řešení je rovno
Obecný r-aproximační algoritmus
- Neexistuje n-aproximační algoritmus pro obecné TSP
- Důkaz sporem
- Uvažujme, že existuje r-aproximační algoritmus s
- Ukážeme, že s tímto jsme schopni řešit existenci hamiltonovské kružnice
- To by znamenalo, že
- Postup:
- Mějme neorientovaný graf , ve kterém chceme najít hamiltonovskou kružnici
- Vytvoříme TSP instanci takovou, že vrcholy jsou totožné a hrany ohodnotíme:
- pro hrany
- pro hrany
- Vyřešíme pomocí
- Pokud je optimum v intervalu , pak Hamiltonovská kružnice existuje
- Pokud je větší, G nemá hamiltonovský cyklus
- To by znamenalo, že jsme schopni řešit EHC v polynomiálním čase algortimem
Metric TSP
- Má vlastnost, že platí trojůhelníková nerovnost )
- Nadále silně NP-hard
- Existují aproximační algoritmy
- Nemetrickou instanci můžeme pevést na metrickou přičtením největší váhy hrany ke všem hranám
- To neporošuje přechozí důkaz, protože nalezené optimum pro transformovaný graf neodpovídá přesně původnímu grafu, protože je k němu přičteno “velké číslo” zatažené transformací
Nearest Neighbor
- Heuristika, nikoli aproximační algoritmus
- Postup:
- Vybereme první vrchol a přeindexujeme na
- Vybereme nejlacinější hranu, která z nás vychází a nejde do vrcholů, ve kterých jsme už byli
- Opakujeme bod 2 dokud nemáme všechny vrcholy
- Spojíme poslední vrchol s
Double-tree (metric TSP)
- 2-aproximační alog
- Algoritmus:
- Najdeme MST
- Všchny hrany v zvojíme
- V nalezneme Eulerovský tah
- Z Eulerovského tahu odebereme vrcholy co jsme už navštívili, ale ponecháme poslední a tím vytvoříme Hamilnovskou kružnici
- Příkald: https://youtu.be/p9qiafTnd6Q?t=3726
- EuT = ABCBADAEA
- TSP = ABCDEA
- Příkald: https://youtu.be/p9qiafTnd6Q?t=3726
- Důkaz faktoru :
- Protozože v grafu platí troúhelníková nerovnost, vynechané hrany nemůžou prodloužit cestu, ( může používat zkratky, které nejsou v )
- Když smažeme jednu hranu v kružnici, vytvoříme strom. Proto platí nerovnost (cena kružnice cena MST)
- Platí protože tvoříme zdvojením hran v
- Z toho vyvozujeme, že
- protože
Christofides Algorithm (metric TSP)
- -aproximační algo
- Algoritmus:
- Najdeme MST
- Najdeme množinu = vrcholům s lichým stupněm z (bude jich sudý počet)
- V množině najdemme Minimum weight matching a tyto hrany přidáme do
- Najdeme Eulerovský tah v upraveném MST
- z Eulerovského tahu odebereme vrcholy co jsme už navštívili, ale ponecháme poslední a tím získáme hamiltnovskou kružnici
- Příkald (pravá část tabule): https://youtu.be/p9qiafTnd6Q?t=4615
- Důkaz faktoru :
- Protozože v grafu platí troúhelníková nerovnost, vynechané hrany nemůžou prodloužit cestu, ( může používat zkratky, které nejsou v )
- Když smažeme jednu hranu v kružnici, vytvoříme strom. Proto platí nerovnost (cena kružnice cena MST)
- Protože perfektní párování používá každou druhou hranu ve střídajiící cestě a protože je to párování s minimální vahou, tak vybere menší polovinu
- Tvorba zaručuje
- Z toho získáme
Tour improvement Heuristic - local seach k-OPT
- Máme nějakou Hemiltonovskou kružnici
- Smažeme hran
- Propojíme oddělené tahy novými hranami tak aby opět vznikla Hemiltonovská kružnice
- Zkontrolujeme zlepšení (nastavitelné kritérium), pokud nezlepšuje => změnu zahodíme
Scheduling
Dáváme všechny tásky zdrojům v čase.
- Pokud se jeden task nevejde mezi relase a deadline je úloha infeasible
- Každá úloha se musí provést
- Můžeme minimalizovat čas (cost) dokončení nebo spoždění (lateness)
- Off-line - známe všechny tasky na začátku
- On-line - postupně nám tasky přicházejí
- Každá task může být v jednu dobu zpracováván jen jedním zdrojem
- Každá zdroj vykonává v jednu dobu max jednu úlohu
- Terminologie:
- - úloha
- typů zdrojů s kapactiou
- Parametry:
- - release time
- - procesing time
- - due date
- - deadline
- - task nemůže začít dokud neskončí
- - preemptive tasks
- - tasky jsou na sobě závislé
- - temporal constrains
- - některé tasky musí mezi sebou mít prostor na set-up time
- Proměnné:
- - start time
- - completion time
- - lateness =
- Graham’s Notation
- (příklad: )
- jsou zdroje
- jsou vlastnosti tasky
- jsou kritéria řešení
- - délka rozvrhu
- suma časů dokončení
- suma vážených časů dokončení
- zpoždění
- (příklad: )
One resurce scheduling
- = 1
- Nejrychleji dokončeno
- - easy (seřadím dle závislostí + naskládám za sebe)
- - easy (naskádám za sebe)
- - easy (od nejmenšího )
- - easy (od nejmenšího )
- - NP-hard (krome =1 easy)
Důjaz že je silně NP-Hard
- Redukce z 3-partion problému
- Mějme 3-Partition rozhodovací problém
- Multiset čísel (velikost předmětů)
- Kladné číslo (velikost košů) takové, že platí a
- Ptáme se, jestli jsme schopni rozdělit přesně 3 přeměty do každého koše tak, že se přesně vejdou
- Vyrobíme rozvrhový problém , který se skládá ze úloh takových, že:
- ; umělé tasky oddělující subsety
- ; každý tento task odpovídá elementu

- Nejmenší doba čekání
- - easy (seřazené dle - SPT shortest processing time first)
- - easy (seřazené dle )
- - NP-hard
- - easy (upravené seřazení dle )
- - NP-hard
- - easy (upravené seřazení dle )
- - NP-hard
- - NP-hard
- Nejmenší lateness (v je , může být záporný)
- - easy (nejdřívšjší první = EDD - earliest due date first)
- - NP-hard
- - easy (EDD)
- - easy (EDD Horn)
- - easy (EDD/EDF Horn)
- - easy (převod na a pak EDD/EDF)
Bratley’s Algorithm
- Algoritmus:
- Začnu stromovou strukturu s levely (=počtu tasků)
- Root na levelu 0 je před vložením prvního tasku
- Na level 1 zadávám první tasky, na levelu 2 zadávám druhé tásky ze zbytku, atd.
- Pravidla pro ukončení větve:
- Pokud mezi childy nodu, existuje child, který nedodrží deadline tasku do nodu se nazanořuji
- Jestliže jsem našel node, který dokončil všechny využité tasky před všech zbylích tasků, jsem v optimální větvi stačí projít pouze childy tohoto nodu
- Jestliže jsem našel řešení a test optimality říká true skončím
- Pokud moje rozpracované řešení má horší hodnotu než již nalezené řešení nezanořuji se dál
- BRTP
- Podmínky:
- První úloha v rozvrhu musí začínat na svém release timu
- Všechny úlohy běží bez “idlu”
- Jestliže platí, pak je rozvrh optimální
- BRTP není nezbytnou podmínkou optimality!! (tzn. rovrh může být optimální, ačkoli BRTP neplatí)
- Důkaz (divný):
- Poslední úloha nemůže být dokončena dříve
- Pořadí předcházejích úloh není důležité
- Žádná úloha nemůže být dokončena před
- Po není žádná další úloha
- Podmínky:
- příhlad https://youtu.be/idc516WZZ1I?t=5131
Branch and Bound with LP-bounding
- Branch and bound dokud nenajdu první řešení
- Poté mohu využít částečné řešení ve větvi a spustit LP na zbytek větve
- Výsledek LP () bude lower bound zbytku ve větvi, tudíž pokud +částeční řešení větve > aktuálně nejlepší řešení větev neprocházím
- Lze použít i jiný zpusob nalezení lower boundu
Horn’s algorithm
- řeší: Eareliest Due Date firts a Earliest Deadline First
- algo:
- najdu kde jsou tasky
- do množiny vložím tasky s
- z množiny vyberu task s
- najdu kde jsou zatím nevybrané tasky do nebo
- tasku pustím na zdroji (odečítu čas do přerušení od )
- 2 možnosti přerušení:
- pokud doběhlo vracím se do bodu 3
- pokud zdroj došl na čas a vracím se do bodu 2
- algorithm končí když se provedly všechny tasky
- příklad: https://youtu.be/MjekjcErKPc?t=708
Chetto, Silly, Bouchentouf algorithm
- pouze změní tasky aby se dal použít Horn
- algo:
- posunout release daty:
- v grafu precedencí najdu tasky , které na jiný nečekají
- jejich následovníkům nastavím release time na
- v grafu precedencí najdu tasky , které mají všechny své předchůdce upravené dle bodu 2
- dokud v bodě 3 najdu tasky vracím se do bodu 2
- posun dealinů:
- v grafu precedencí najdu tasky , které nemají následovníky
- jejich předchůdcům nastavím deadline na
- v grafu precedencí najdu tasky , které mají všechny své následovníky upravené dle bodu 2
- dokud v bodě 3 najdu tasky vracím se do bodu 2
- posunout release daty:
- příklad: https://youtu.be/MjekjcErKPc?t=1874
Paralel identical resource scheduling
- = P
- Nejrychleji dokončeno
- - NP-hard (stejné jako rozdělování lupu mezi dva lupiče)
- - easy (McNaughton)
- - easy (rozhodovcí max-flow)
- - NP-hard (LS-aproximation)
- - NP-hard (LPT aproximation, dynamické programování)
- - NP-hard (Muntz&Coffman’s level algorithm)
McNaughton
- algo:
- spočítám si )
- dávám tasky na zdroj
- pokud mi task přeteče vyberu další zdroj na který nejdříve vložím zbytek tasku co přetekl
- dokud nejsou využity všechny tasky vracíme se do bodu 2
- příklad: https://youtu.be/MjekjcErKPc?t=3452
LS-aporximation - List scheduling
- kde je počet identických zdrojů
- algo:
- uspořádáme tásky do seznamu
- vybereme zdroj se zatím nejkratším vytížením (konec posledního tasku na zdroji )
- vytvoříme seznam s tasky s nejmenším (availability time) ve stejném pořadí jako v
- z vybereme první task a vložíme ho do se startem v
- dokud nejsou využity všechny tasky vracíme se do bodu 2
LPT-aproximation - Longest procesing time first
- kde je počet identických zdrojů
- kde je počet identických zdrojů a počet tasků na zdroji, který skončí jako poslední
- LS-aproximation bez a s seřazeným (v bodě 1) sestupně dle
Rothkopf - dynamické programování ()
- kde je počet identických zdrojů
- algo:
- vytvoříme rozměrnou tabulku s jedním True v počátku souřadnic
- vezmeme task ze zbylých tasků
- projedeme všechny buňky tabulky a hodnty true zkopírujeme na pozice v ose větší o
- staré hodnoty z tabulky smažeme
- dokud nejsou vybrány všchny tasky vracíme se do bodu 2
- vyhrává True v tabulce s nejmenší kde jsou názvy os (a.k.a. nejkratší vzdálenost od počátku souřadnic k True)
- Příklad: https://youtu.be/MjekjcErKPc?t=5759
Muntz&Coffman’s level algorithm ()
- kde je počet identických zdrojů
- algo:
- otagujeme tasky levely
- nejdříve beru tasky , ze kterých v precedentím grafu už nic nevychází
- taskům nastavím level =
- vyberu předcházející tásky tásků z a vytvořím nové s těmito tasky
- levely tasků nastavím jako level = kde jsou levely následovníků
- dokud nejsou olevelovány všechny tasky vracím se do bodu 3
- schduling:
- do množiny vložím tasky, které nemají nedokončené předchůdce (jsou available)
- z množiny vyberu tasky s do množiny
- všechny tasky z rozložíme rovnoměrně na zdroje (jeden task nesmí běžet na 2 zdrojích zároveň, ale více úloh se může o čas na zdroji podělit)
- pokud mi zbyli zdroje a tásky v vracím se do bodu 2
- spustíme zdroje
- zdroje přerušíme jakmile nějaký task na zdroji dožene level jiného tasku nebo se task dopočítá všechny tásky vyndáme ze zdrojů a vracíme se do bodu 1
- otagujeme tasky levely
- příklad: https://youtu.be/MjekjcErKPc?t=7382
Project scheduling ( = PS) --------------------------------------------
- - temporal constraints
- Nejrychleji dokončeno
- - NP-hard
- - NP-hard
Temporal Constraints
Máme-li úlohu a úlohu kde z do existuje hrana s hodnotou . Pak to znamená .
- Aby byl Schedule feasible v grafu musí být pouze záporné cykly
- převod z na
- Nejdříve vytvořím na začátek všeho a na konec všeho
- tasky zdrojů vložím postupně za sebe
- nové kde je id zdroje
- nové
- každý task taky musíme omezit z dvěmi temporal constraints, aby byl ve svém okně
- příkald: https://youtu.be/dhe54BPDNwo?t=4676
CP
- CSP - Constraint staisfaction problem (NP-hard)
- domain - možné hodnoty proměnné
- constrant - binární relace mezi 2 proměnnými (omezující domény)
Global constraints
- aplikovat až na konci algoritmů
Propagation and Search
- algo:
- pomocí constraints zkontroluji proměnné
- nakreslím node první proměnné
- nakreslím tolik větví, kolik hodnot domény má vztah s nanásledující proměnnou
- postupně procházím childy a postupuji stejně jako v bodu 3
- skončím na kreslení větví poslední proměnné
- reálné CSP používá DFS a zastaví se při nalezení prvního řešení
- příkald: https://youtu.be/SPsN60AC2jE?t=1698
AC-3 Algorithm
- Arc consistency - při vztahu z domény do existuje ke každé možné doménové hodnotě existuje alespoň jedna , které splňuje všechny constraints
- CSP je arc consistent pokud všchny hrany jsou arc consistent
- algo:
- do seznamu vložíme postupně všechny arcs propojení proměnných dle constraints
- ze seznamu vyjmeme první dvojici proměnných
- Revise Procedure - proměnnou uděláme arc consistent k proměnné (proškrtáme doménu )
- pokud jsme doménu upravili (prošrtali) vložíme do všechyn závislosti na , které ještě v nejsou (a kromě )
- pokud v existuje další proměnná jdeme zpět do bodu 2
- příklad: https://youtu.be/SPsN60AC2jE?t=3287