PAG Výpisky
Tasky & dekompozice
Tasky
- Při návrhu paralelního algoritmu musím prvně zadefinovat tasky, které se provádí paralelně
- Tasky se velikostně liší
- Task dependency graph - DAG - vyjadřuje závislost prováděných tasků
- Granuality - množství tasků, do kterých problém dekompunuju
- Fine-grained decomposition - velké množství tasků
- Coarse grained decomposition - malé množství tasků
Pojmy
- Degree of concurrency - Počet tasků, které mohou být prováděny paralelně
- Maximum degree of concurrency - Maximální počet tasků, které mohou být prováděny paralelně
- Average degree of concurrency
- Průměrný počet tasků, které mohou být prováděny paralelně po dobu běhu algoritmu
- Počet tasků / critical path length
- Degree of concurrency je závislé na granuality
- Critical Path Length - Nejdelší možná cesta, kterou běh algoritmu vykoná v rámci task dependency graphu
- Granualitu nelze snižovat do konečna - každý problém má maximální možnou granualitu
- Tasky spolu musí často komunikovat -> overhead - přílišná granualita nemusí být žádoucí
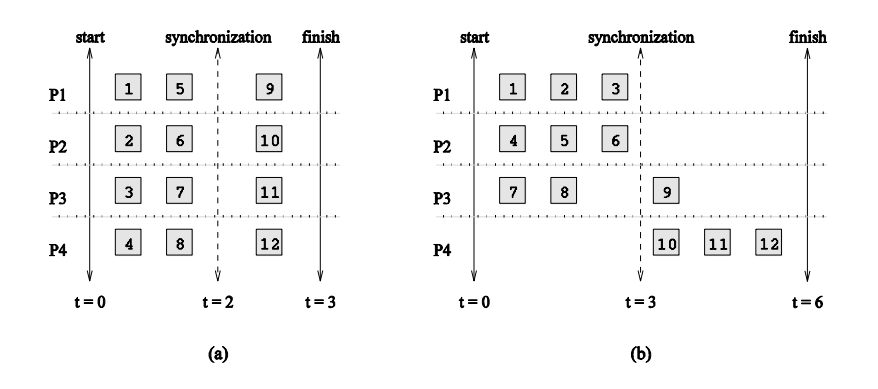
Příklad
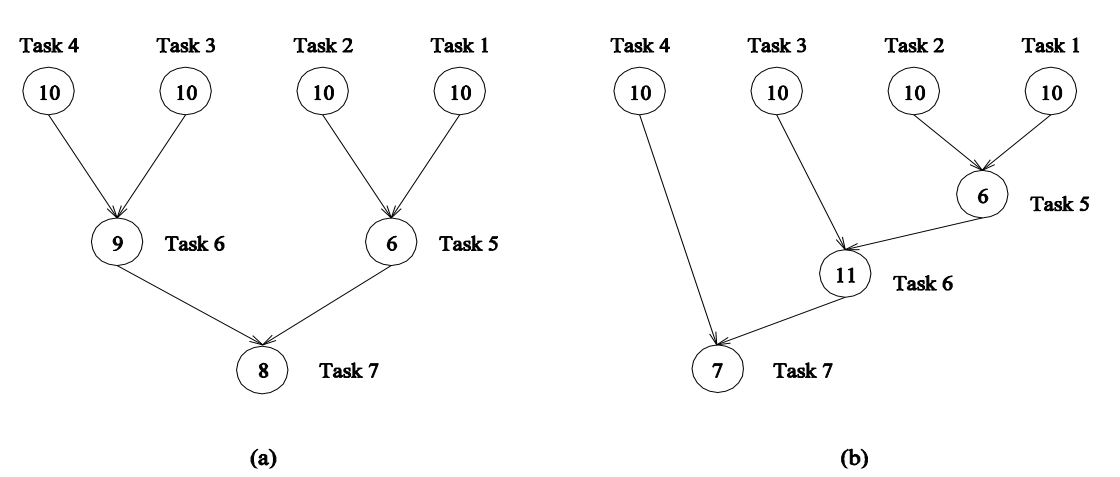
- (a)
- Critical path length - 3 (4 nebo 3 -> 6 -> 7)
- Shortest parallel execution time - 27
- Processors count for minimum parallel execution time - 4
- Maximum degree of concurrency - 4
- Average degree of concurrency - 7/3 ❓
- (b)
- Critical path length - 4 (2 nebo 1 -> 5 -> 6 -> 7)
- Shortest parallel execution time - 28
- Processors count for minimum parallel execution time - 2
- Maximum degree of concurrency - 4
- Average degree of concurrency - 7/4 ❓
Task Interaction Graphs
- Graf komunikace tasků
- Tasky spolu často musí komunikovat (vyměňovat data), tuto komunikaci lze znázornit grafem
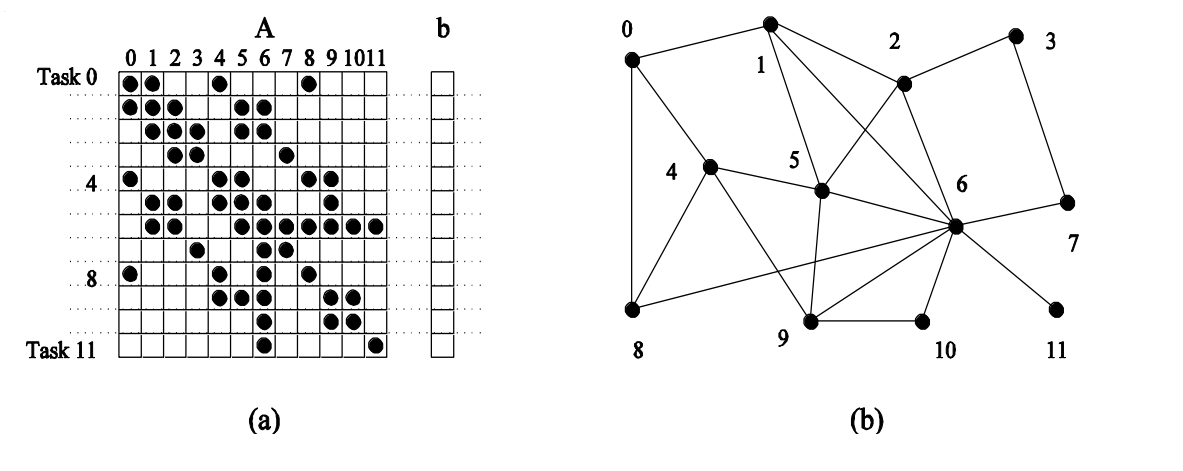
Příklad
- Představme si násobení sparse matice A vektorem b
- Potřebujeme násobit pouze nenulové prvky z matice A (znázorněno černou tečkou)
- Každý task má přiřazen řádek matice A a jeden prvek vektoru b
- Např. pro provedení násobení prvního řádku se musíme doptat tasků 1,4,8 na jeho prvek z b, protože náš řádek zde obsahuje nenulové číslo a my ho potřebujeme vynásobit s příslušným prvkem z b, který náš task ale nezná
Techniky dekompozice
Jak dekomponujeme problém na tasky?
Rozlišujeme čtyři základní techniky
Recursive decomposition
- Vhodná pro problémy divide-and-conquer (eg. quick sort)
- Rekursivně dekomponujeme problém dokud nedosáhneme požadované granuality
Příklad
Quicksort
- Každý sub-list může být rekurzivně zpracováván paralelně
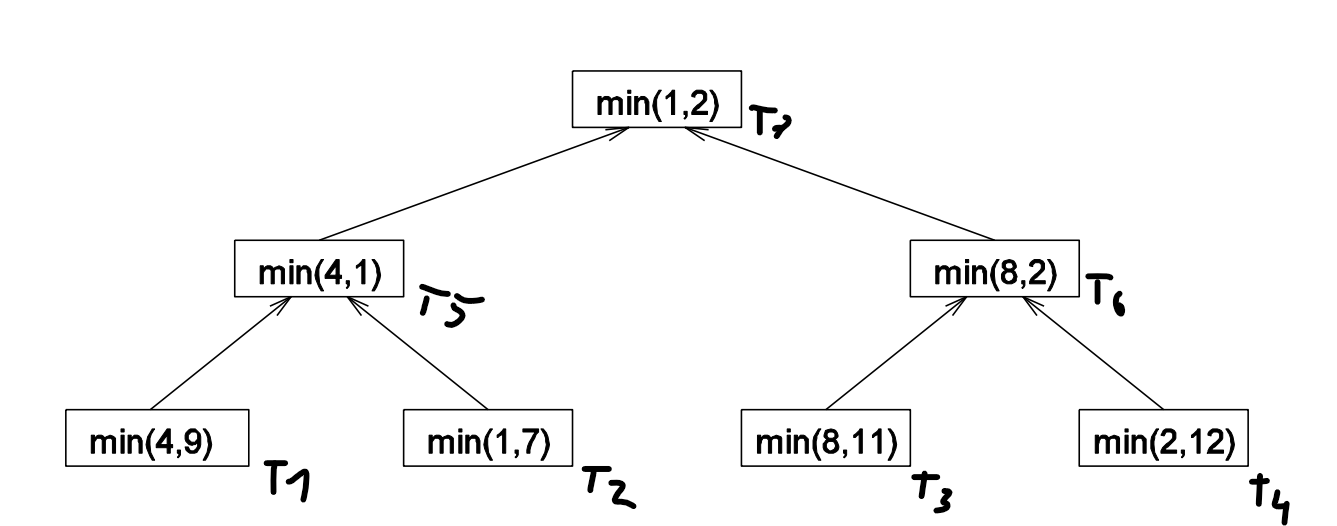
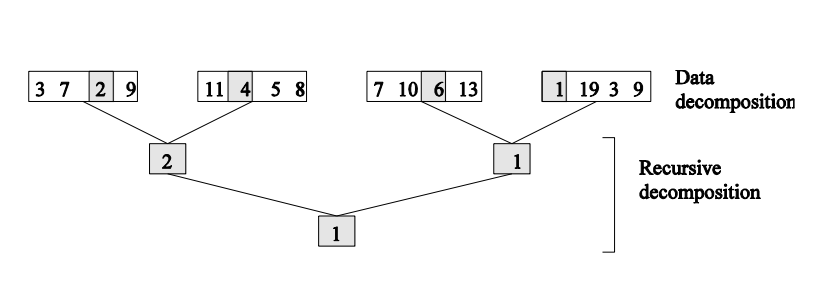
Hledání minima v listu
- Můžeme to pochopitelně dělat sériově
- Paralelně list 4,9,1,7,8,11,2,12 můžeme zpracovat následovně
Data decomposition
- Spoléha na charakteristiku dat, s kterými algoritmus pracuje
- Dekompunujeme tyto data na jednotlivé tasky
- Volba dekompozice značně ovlivňuje výkon algoritmu
- Více přístupů
- Output data partitioning
- Input data partitioning
- Intermediate data partitioning
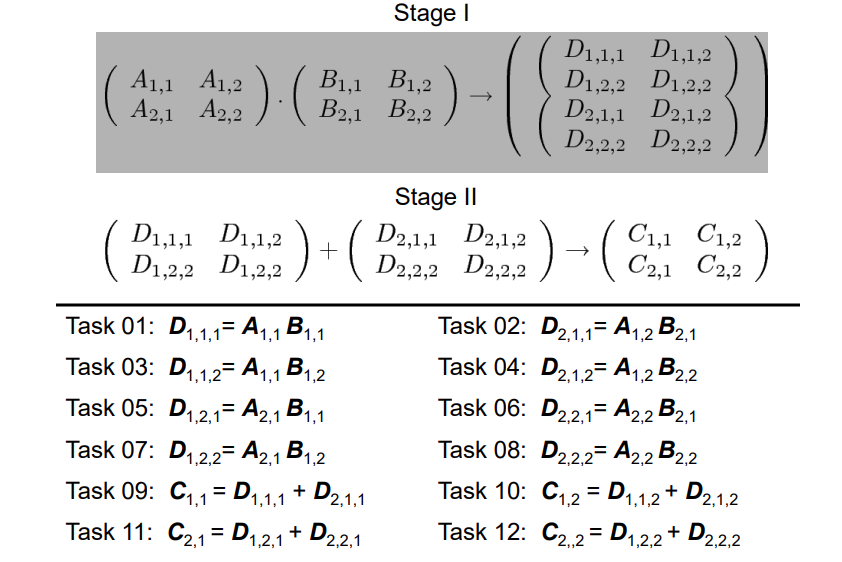
Output Data Decomposition
- Element výsledku je spočten nezávisle na ostatních výsledcích
- Pro stejný problém může existovat více output dekompozic
Příklad
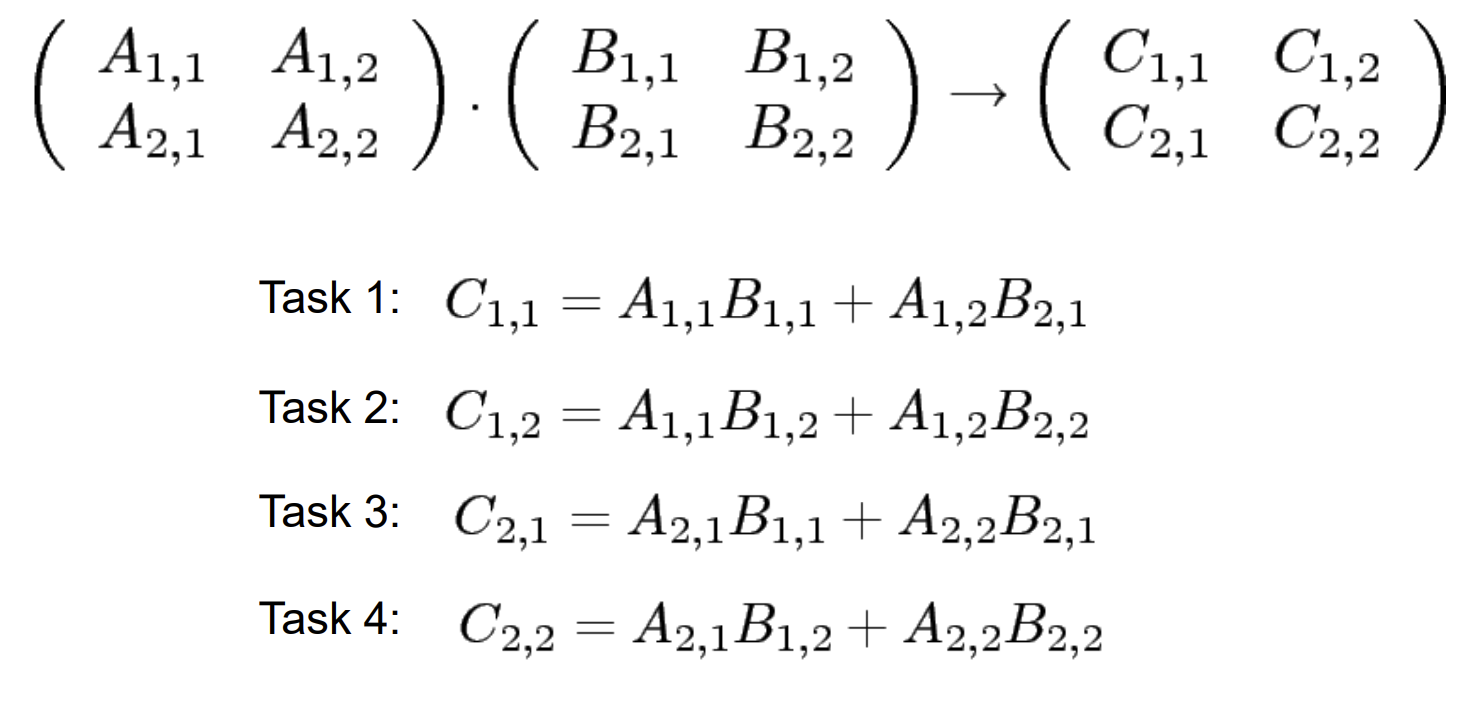
Násobení dvou matic
- Každý výsledek C je nzávislý na ostatních C
Itemset
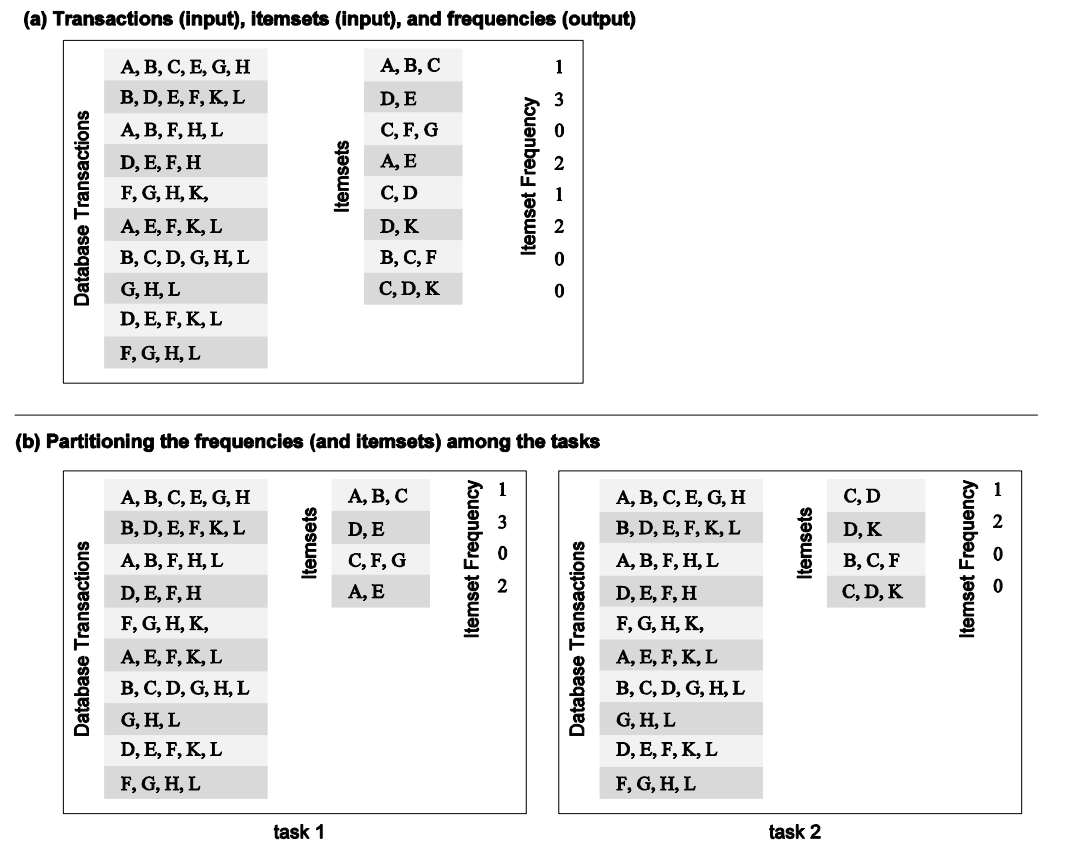
- Chceme spočítat počet výskytů itemsetu v databázi transakcí (a)
- To můžeme dekomponovat, tak že rozdělíme itemsety do více tasků (b)
- Nepotřebujeme žádnou komunikaci mezi tasky
Input Data Partitioning
- Výstup je spočten jako funkce ze vstupu
- V mnoha případech jediná možná dekomnozice - nevíme co je výstup (např. hledání minima, sort listu)
- Tasku je přiřazena část vstupních data
Příklad
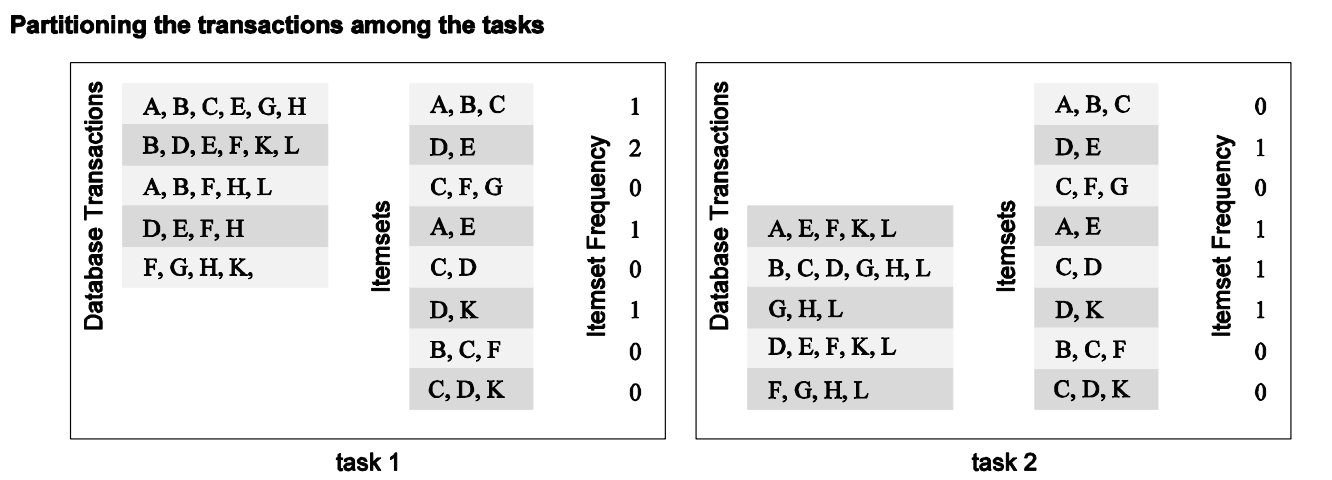
Itemset
- Rozdělíme databázi transakcí do více tasků
- Výsledky z jednotlivých tasků poté agregujeme do konečného výsledku
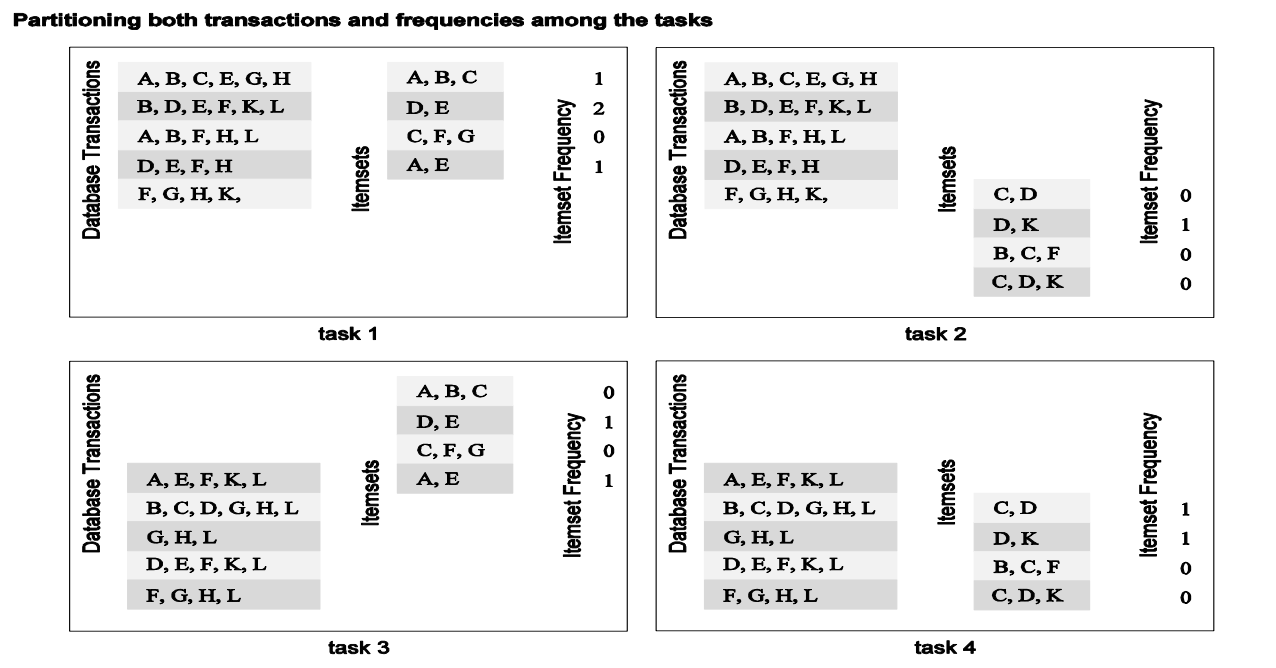
Input and Output Data Partitioning
- Kombinace obou přístupů
Intermediate Data Partitioning
- Sekvence transformací ze vstupních na výstupní data
- Počítáme “mezivýsledky” které následně tranformuje na výsledek
- Často přívější task dependency graph -> rychlejší
Exploratory Decomposition
- Dekompozice probíhá společně s průběžnými výpočty
- Použitelmé pro problémy které zahrnují explorativní hledání v prostoru řešení
- 0/1 integer programming
- QAP - Quadratic assignment problem
- Theorem proving
- Hry (např. šachy)
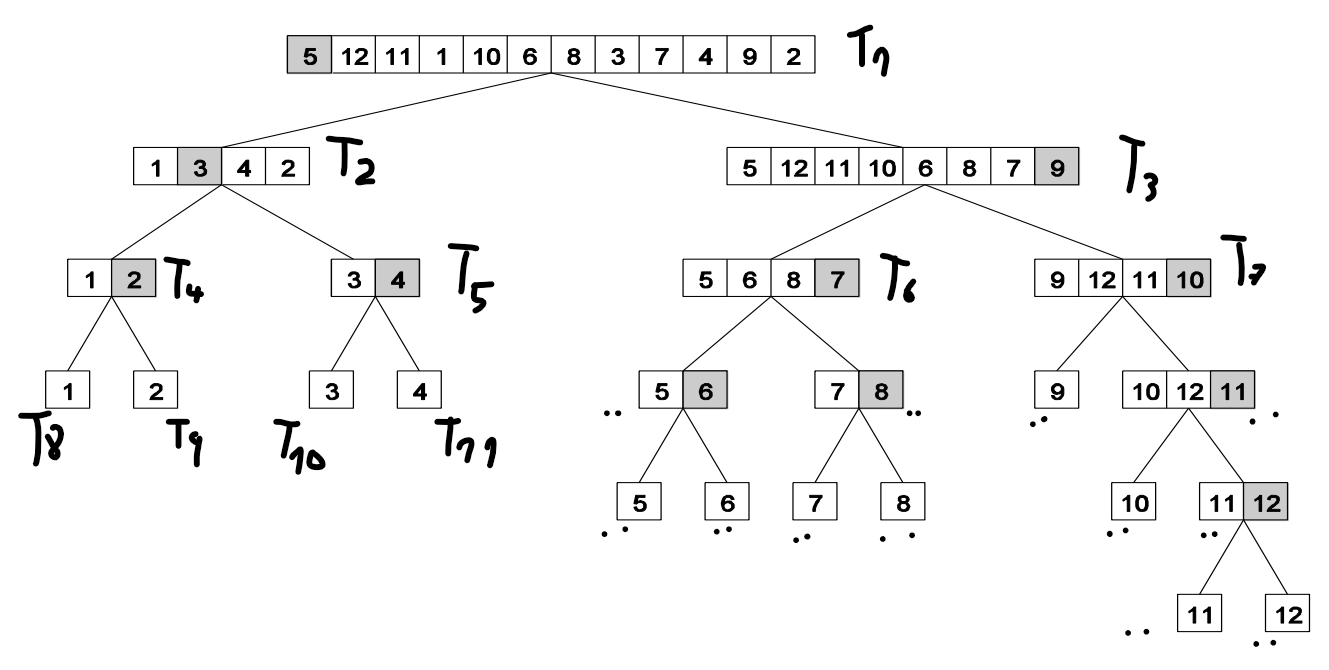
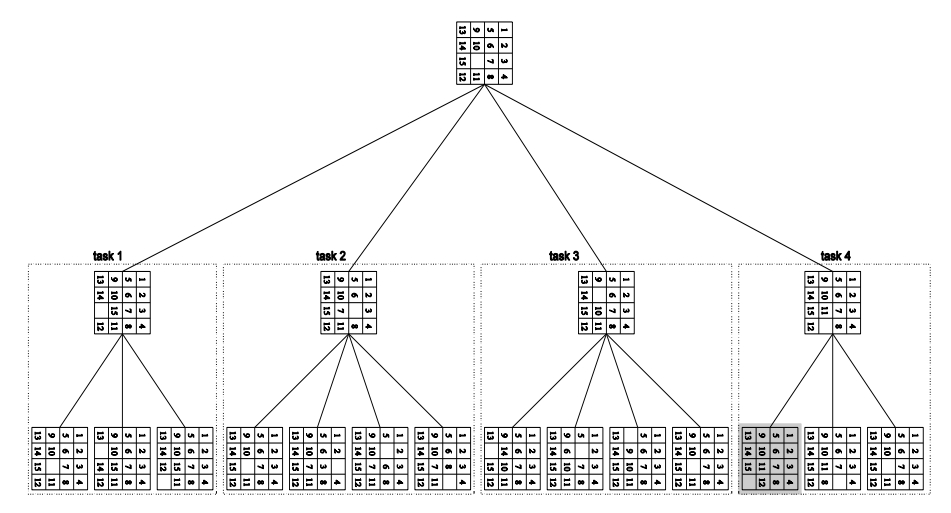
Příklad
15 puzzle
- Posouváme prvky v 2d gridu tak, aby byly seřazené
- Paralelně můžeme v rámci každého tasku počítat všechny možné kroky a najít ty, které jsou správné (na obrázku je správný výsledek podbarven šedě)
Anomalous Computations
- V mnoha případech může explorativní dekompozice měnit množství vykonané práce v širokém rozsahu
- Tzn. že může stejný algoritmus být pro nějaké instance velmi rychlý (sublinear speedup) a pro jiné velmi pomalý (superlinear speedup)❓
Hybrid Decompositions
- Mix dekompozičních technik
- Často nutný pro dekompozici problémů
- Quicksort
- Pouze rekurzivní dekompozice limituje maximální možnou paralelizaci
- Lepší je použít mix data a rekurzivní dekompozice
- To je způsobeno tím, že ❓ (hádám, že lepší než pivotovat dlouhý list je lepší to prostě rozesrat na víc procesorů rovnou)
- Hledání minima
- Opět je lepší použít mix data a rekurzivní dekompozice
Tasky
- Problém dekomponujeme na tasky
- Charakteristictika těchto tasků značně ovlivňuje výkon algoritmu
- Faktory:
- Task generation (Generování tasků) - Jak je tvoříme
- Task sizes (Velikost tasků) - Jak jsou tasky velké
- Size of data associated with tasks (Množství asociovaných dat) - Kolik dat jednotlivé tasky zpracovávají
Task generation (generování tasků)
Static task generation
- Víme, kolik tasků bude potřeba na začátku běhu algoritmu
- Např. maticové operace, grafové algortimy, zpracovávání obrázků
- Pravidelně strukturované problémy
Dynamic task generation:
- Generujeme tasky v průběhu běhu algoritmu
- Např. 15 puzzle board
- Exploratory nebo speculative decomposition
Task sizes
Uniform
- Jednotná velikost tasků
Non-uniform
- Různě velké tasky
- Nevíme, jak budou tasky velké
- Např. discrete optimization problems
Mapping Techniques
- Tasky musíme přidělovat (mapovat) na fyzické procesory (jádra)
- Toto musí být uděláno chytře
- Minimalizujeme overheads
- Způsobený komunikací
- Způsobený nečiností (nepřidělenou prací) některého procesoru
- Minimalizace je optimalizační problém a často si odporuje - např. přidělením celé práce jedinému procesoru minimalizuje komunikace, ale způsobí nečinost všech ostatních procesorů
Mapping Techniques for Minimum Idling
- Musíme současně minimalizovat idling a provádět load balancing
- Pouhý loadbalancing neminimalizuje idling!
- Mapování je ovlivěno velikostí tasků, zpsůbem generování, velikostí asociovaných dat
- Případ (a) je otpimální, případ (b) není
Dva základní přístupy
- Static mapping (statické mapování)
- Předem určíme který task bude zpracovávat jaký procesor
- Musíme znát (nebo alespoň odhadnout) velikost tasků
- Stejně se jedná většinou o NP-complete problém
- Dynamic Mapping
- Tasky přidělujeme po dobu běhu
- Použijeme když např. generujeme tasky za běhu nebo neznáme jejich velikost
Komplexita
- Obecně se často jedná o NP-Complete problém
- Tasky mají závislosti
- Na jeden procesor - P
- Uniform tasky na 2 a více procesorů - NP-complete
- Non-uniform tasky na 2 a více procesorů - NP-Complete
- Bez závislostí
- Na jeden procesor - P
- Non-uniform tasky na 2 a více procesorů - NP-complete
- Uniform tasků na 2 a více procesorů - P
Schemes for Static Mapping
Mappings Based on Data Partitioning
TODO
Komunikace mezi procesory
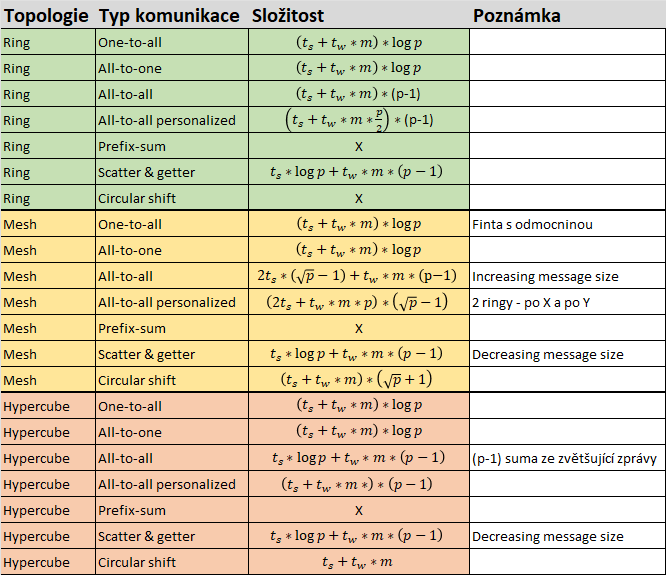
Přehled vzorců
Komunikace mezi tasky
- Je třeba implementovat efektivně
- Musí vycházet z architektury použitého paralelního systému
- Skupinová komunikace je realizována jako více point-to-point zpráv
- Poslání zprávy o velikosti m zabere na nezahlcené síti t_s + t_w * m
- Tato metrika je použitá k měření rychlosti komunikace
- Pakliže potřebujeme počítat se zahlcenou sítí -> zvyšujeme t_w
- Předpokládáme, že komunikační síť je obousměrná a jednoportová
One-to-All Broadcat
- Jeden procesor zasílá data o velikosti m všem ostatním procesorů
All-to-One Reduction
- Všechny procesory zasílají zprávu o velikosti m jednomu procesoru
- Tyto data jsou na “centrálním” procesoru agregovány použitím asociativní operace (např. plus, minimum)
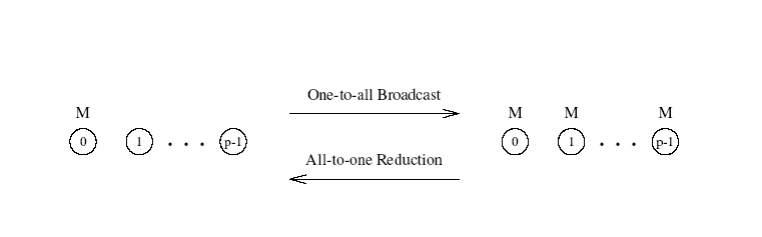
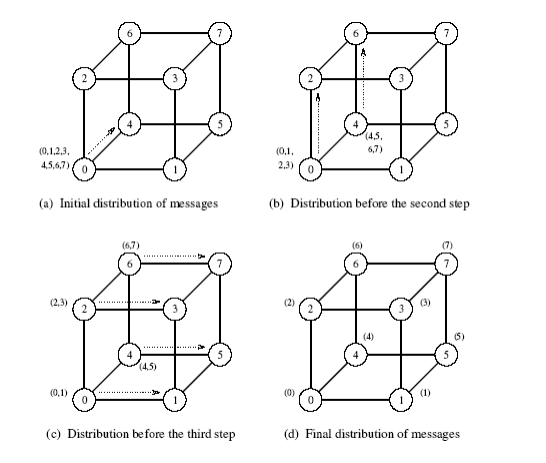
One-to-All Broadcats / All-to-One Reduction
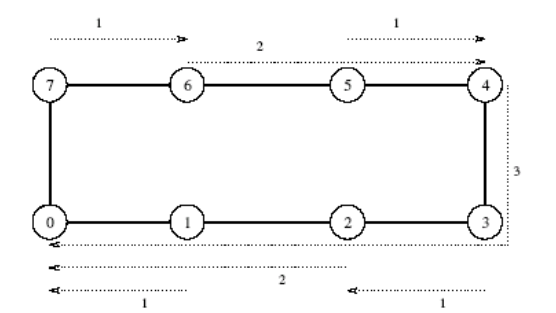
Ring
- Broadcast - K poslání p - 1 zpráv použijeme rekurzivní dvojení (recursive doubling)
- Zdrojový procesor odešle zprávu na první procesor. Nyní mají oba dva tyto procesory na starosti pouze půlku ze všech procesorů
- Redukce - Obdobný princip ale naopak
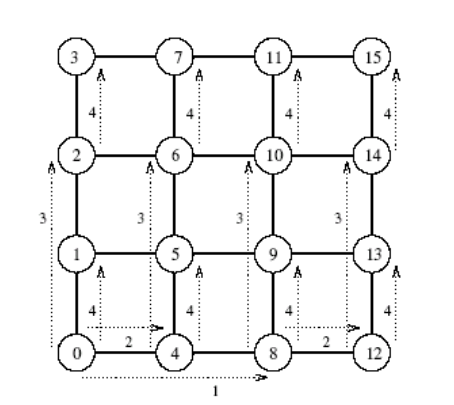
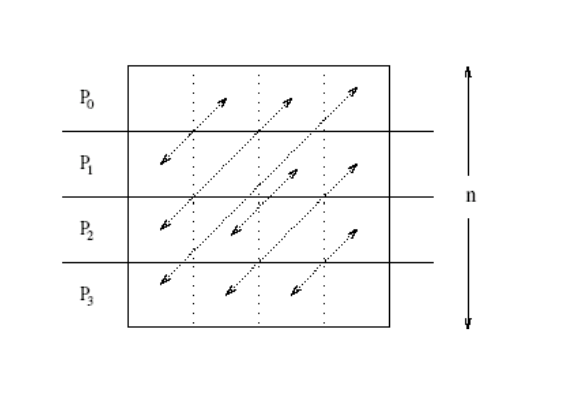
Mesh
- Čtvercová matice p procesorů má sqrt(p) sloupců a řádků
- Broadcast a redukce má dva kroky
- Rozšíříme zprávu po řádce
- Následně posíláme zprávu paralelně po sloupcích
- Zobecnění tohoto postupu funguje ve více dimensích
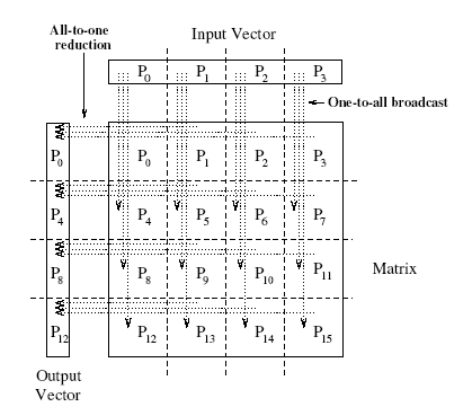
Příklad
- Násobíme matici A vektorem v
- Musíme provést nejprve one-to-all broadcast a následně all-to-one redukci
- Čárkované šipky znázorňují směr komunikae
- Vidíme, že každý procesor P má přidělený čtvercový kus dat matice A a jeden prvek vektoru v
- Pro provedení výpočtu musí tedy kupříkladu procesor P_0 poslat svůj prvek vektoru A na procesor P_4, P_8 a P_12
- Následně kupříkladu procesory P_1, P_2, P_3 zaslšou data procesoru P_0 který provede agregaci sečtením
Hypercube
- K hypercube s 2^d nody můžeme přistupovat jako k d-dimensionální meshi (dva vrcholy na dimensi)
- Mesh algoritmus můžeme generalizovat k použití na hypercube s d = log(p) kroky
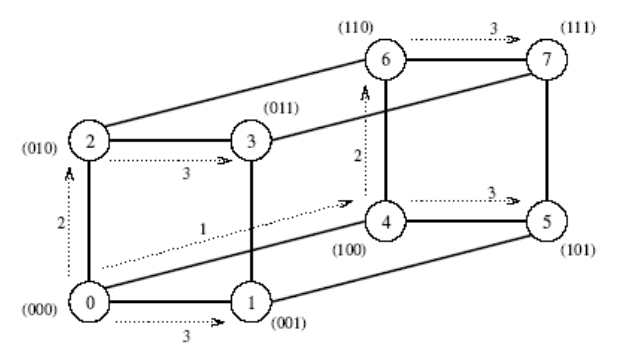
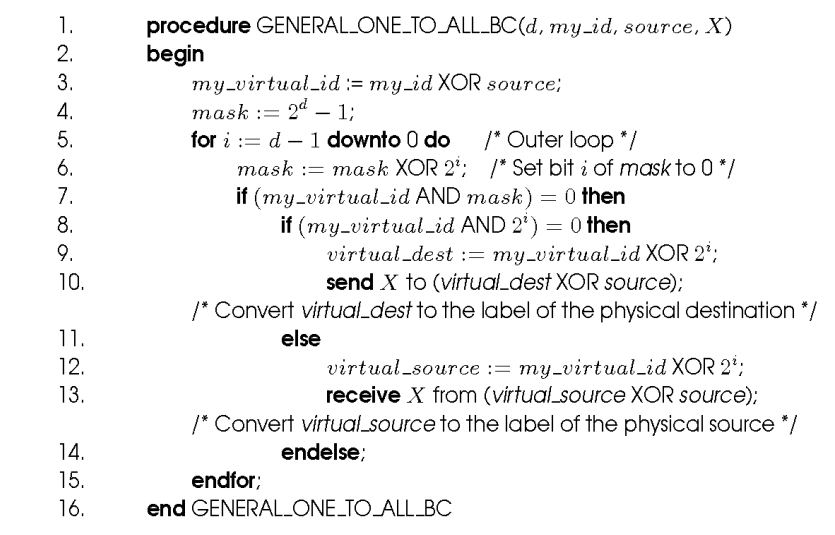
Algoritmy pro broadcasts a reductions
- Všechny výše zmíněné příklady komunikace (viz. obrázky) používají stejný princip
- Algoritmus může být snadno přizpůsoben i pro další topologie
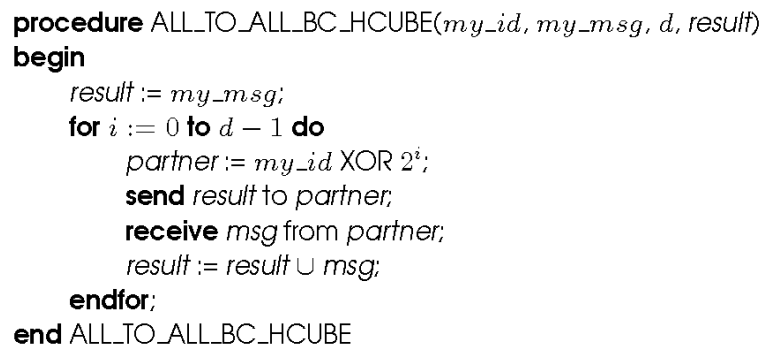
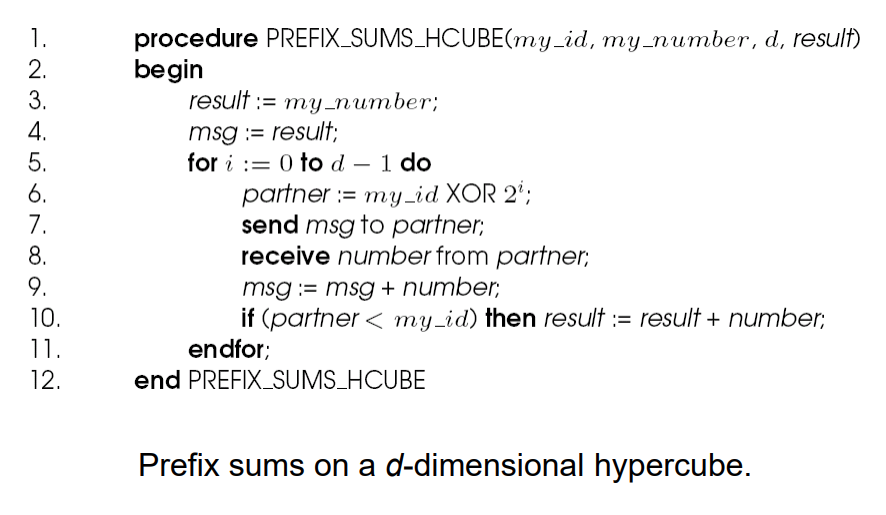
One to all (hypercube)
All to one (hypercube)
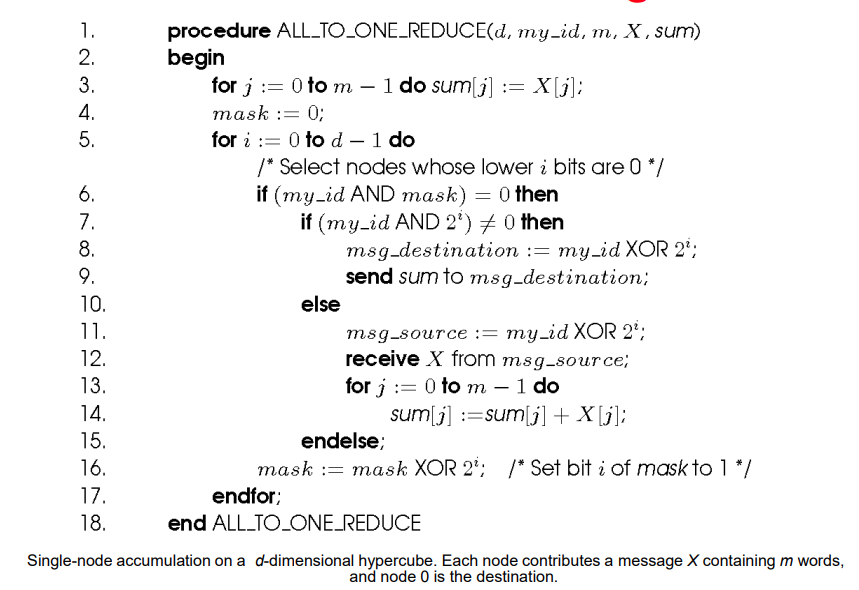
Cost analysis
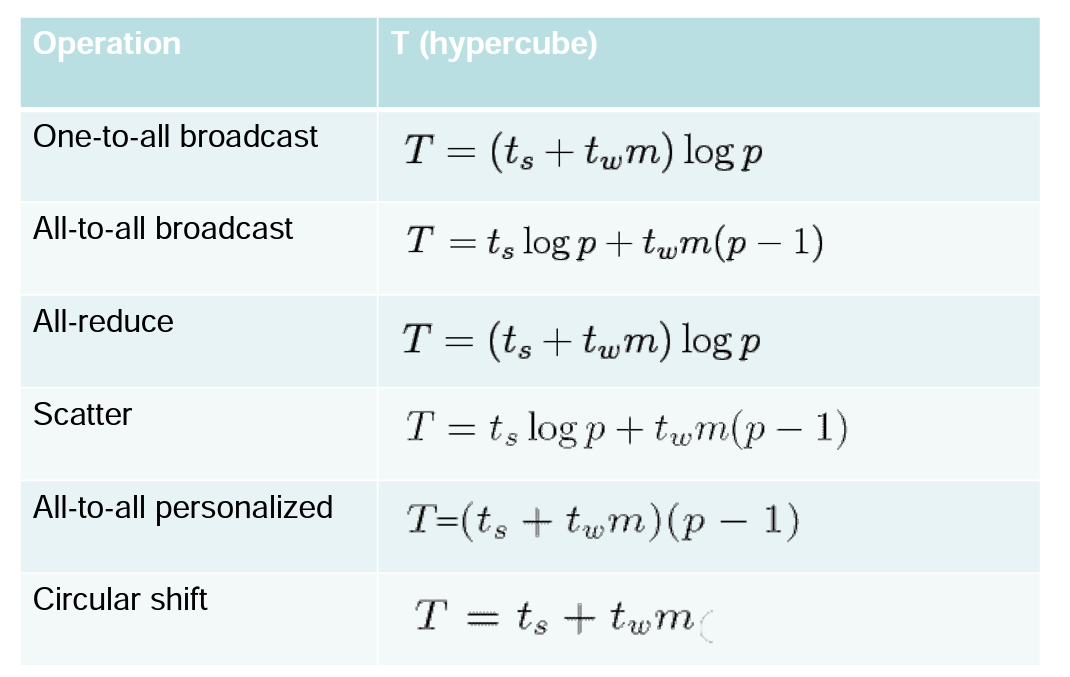
- Broadcast i redukce potřebuje log p point-to-point přenosů, kde kadžá stojí poslat t_s + t_w*m
- Celková cena je tedy: T = (t_s + t_w*m) * log(p)
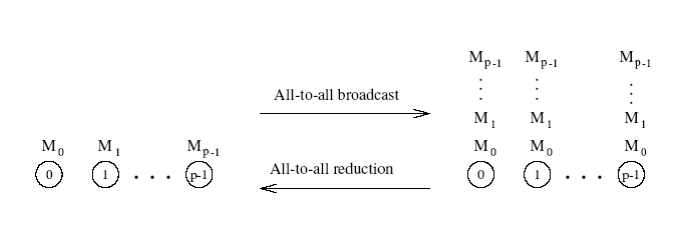
All-to-All Broadcats
- Generalizace přechozího, kde každý procesor vysílá i příjímá zprávy současně
- V rámci procesu každý procesor pošle stejnou zprávu velikosti m všem ostatním procesorům
- Různé procesy mohou posílat různé zprávy
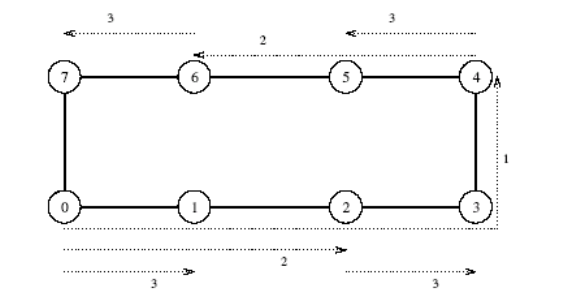
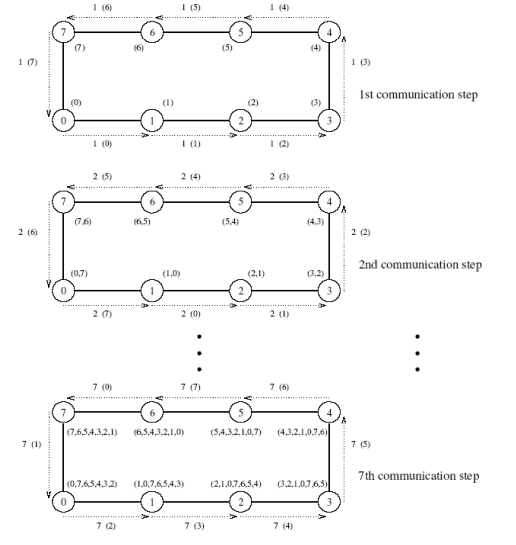
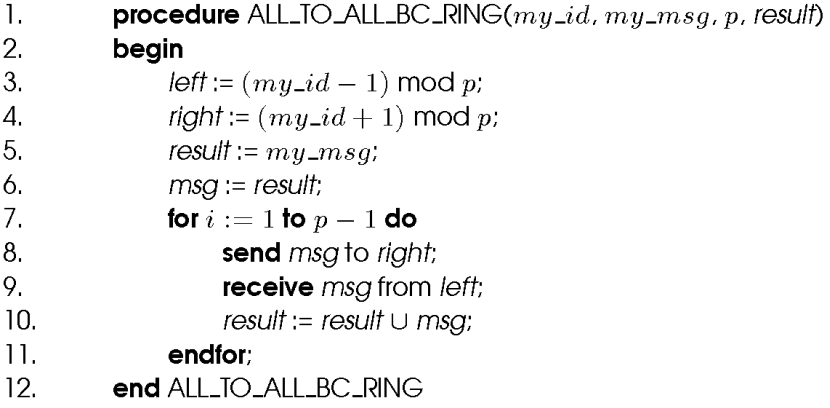
Ring
- V prvním kroku zašle každý procesor svoji zprávu sousedícímu procesoru pro směru hodinových ručiček
- V každém dalších krocích vždy přepošle data, které obdržel od jednoho souseda druhému sousedu
- Algoritmus končí po p-1 krocích
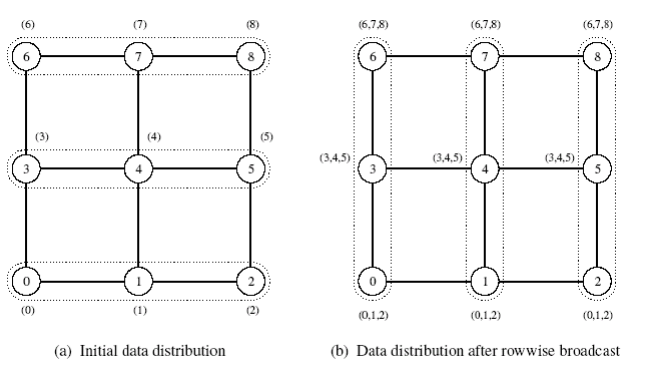
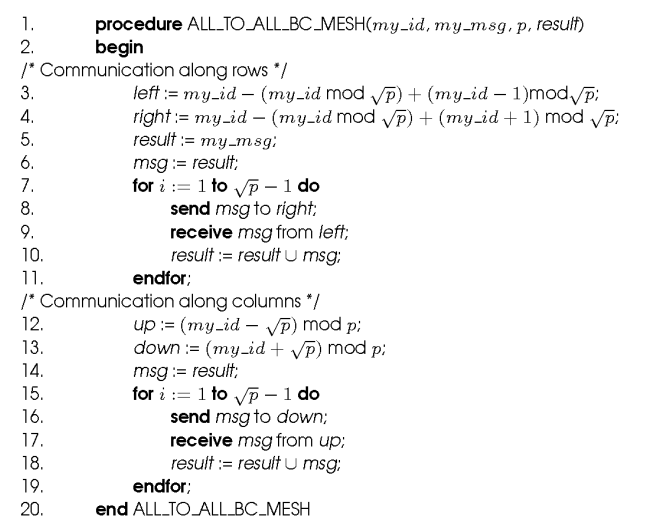
Mesh
- Dva kroky
- Každá řádka mřížky provede all-to-all broadcast mezi sebou “lineárně” - každý node získa sqrt(p) zpráv
- Každý node rozšíří přijaté zprávy jako zprávu velikosti m*sqrt(p) po sloupci
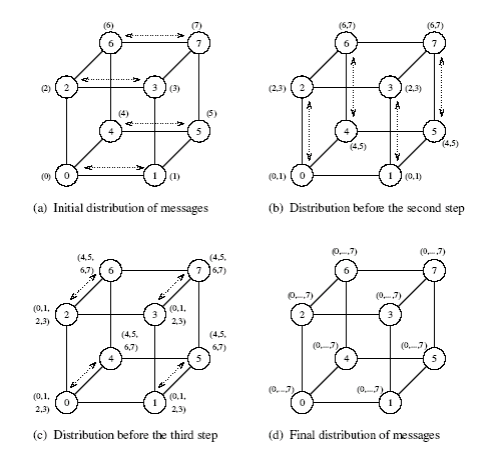
Hypercube
- Zobecnění mesh algoritmu pro log p dimensí
- Velikost zpráv se zdvojnásobuje s každým z log(p) kroků
All-to-All Reduction
- Podobné jako pro all-to-all broadcast, pořadí je opačné
- Při přijetí zprávy ji musí node zkombinovat s lokální kopií zprávy, která má stejnou destinaci jako zpráva přijatá
- Po zkombinování je zpráva zaslána sousedovi
Cost analysis
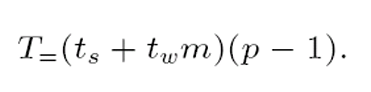
- Kruh - T = (t_s + t_w * m)*(p-1)
- Mesh - T = 2 * t_s * (sqrt(p) - 1) + t_w * m * (p-1)
- Hypercube - T = t_s * log(p) + t_w * m * (p-1)
All-reduce
- Kadžý node začíná s bufferem o velikosti m
- Výsledkem je buffer velikosti m na každém nodu, který obsahuje agregovaná data ze všech nodů za pomocí asociativní operace
- Shodné jako all-to-one reduction s následným one-to-all broadcastem (to je méně efektivní ❓)
- Vhodnější je použít all-to-all broadcast, kde se nezvětšuje velikost zprávy
- T = (t_s + t_w * m) * log(p)
- Rozdíl od all-to-all - neprobíhá p souběžných all-to-one redukcí, každá s jiným cílem výsledku
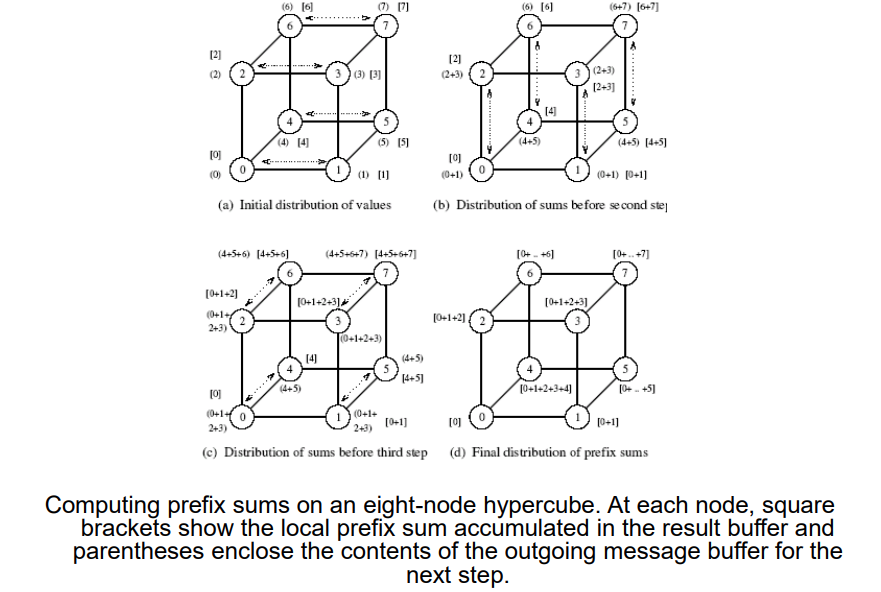
Prefix-Sum
- Mějme p čísel n_0, n_1,…,n_p-1 (každé na jiném nodu), chceme spočíst sumu těchto čísel pro od 0 po k, kde k je v rosahu 0 až p-1
- Jinými slovy na každym nodu chceme sumu z čísel n_x kde x \el {0,…,k} a k je index toho nodu
- Suma nahradí prvek n_k
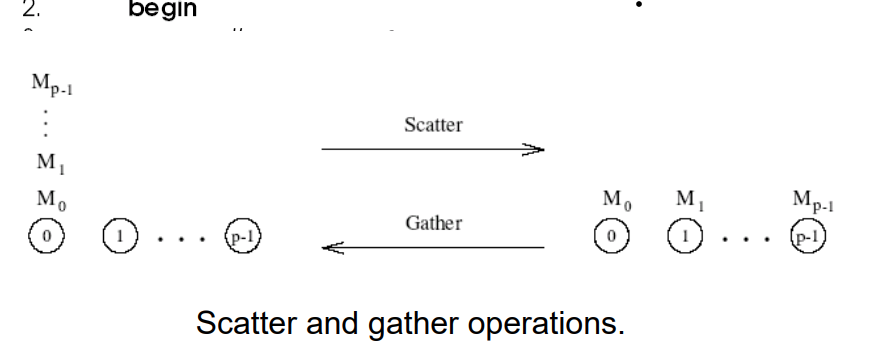
Scatter and Gather
- Dva kroky
- Scatter - Jeden node zašle unikátní zprávu velikosti m všem ostatním nodům (one-to-all personalized)
- Getter - Jeden node sbírá unikátní zprávy od všech ostatních
- Ačkoli je principielně scatter operace jiná než broadcast, algoritmicky se podobají až na velikost zprávy (zprávy se změnšují u scatteru, ale zůstávají stejné u broadcastu)
- Getter operace je inverzní operací scatteru
Cost analysis
- Dochází k log(p) kroků, v každém kroku se půlí velikost zprávy stejně tak jako pomyslná velikost zbývajího stroje
- T = t_s * log(p) + t_w * m * (p-1)
- Toto platí pro linární pole a 2-D mesh
- Tyto časy jsou asymptociky optimální ve velikosti zpráv
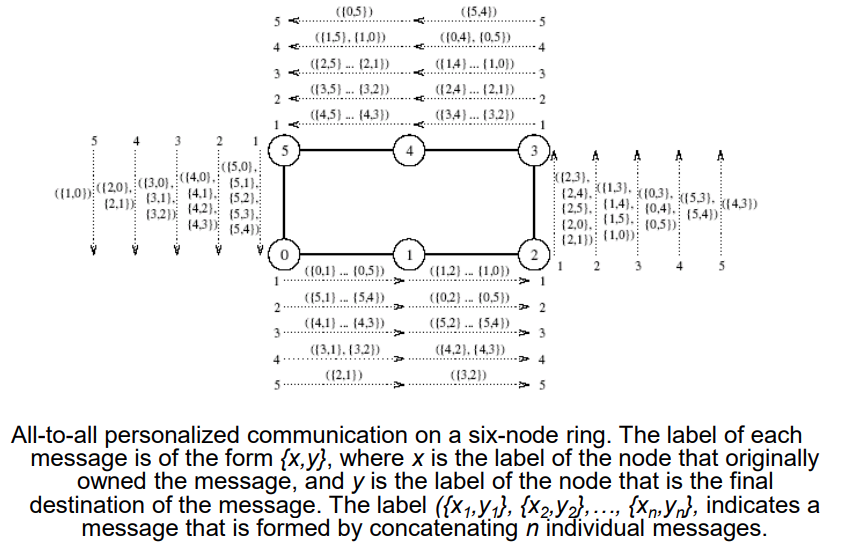
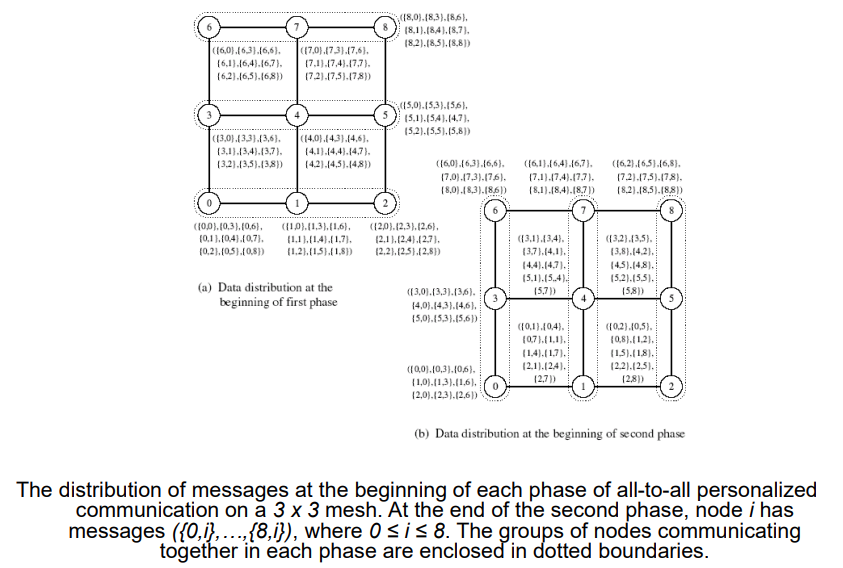
All-to-All Personalized Communication
- Jinak známo jako total exchange
- Každý node má odlišnou zprávu velikosti m pro každý další node
- Nezaměňovat s all-to-all broadcastem, kde každý node posílá stejnou zprávu!

Příklad
- Transponování matice
- Každý procesor obsahuje řádek matice
- Transponování tak vyžaduje all-to-all personalizovanou komunikaci
Ring
- Postup:
- Každý node pošle všechna data jako jednu zprávu o velikosti m * (p-1) jednomu ze sousedů
- Každý node si vybere zprávu určenou pro něj a zbytek pošle dál
- Algortimus končí za p - 1 kroků
- Zpráva se každý další krok zmenšuje o m
Cost
- Máme p -1 kroků
- v i-tém kroku je velikost zprávy m * (p - i)
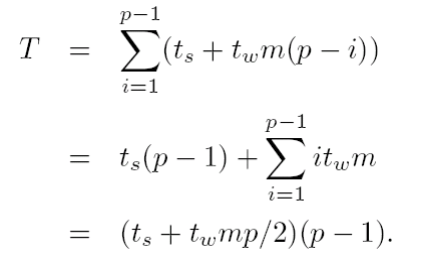
- Člen t_w může být dělen 2 pomocí obousměrné komunikace ❓
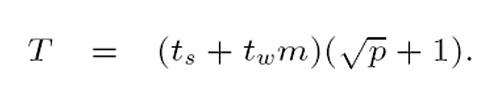
Mesh
- Postup:
- Každý uzel nejprve seskupí svých p zpráv podle sloupců jejich cílových nodů
- Na všech řádcích se nezávisle provede All-to-all personalised komunikace se seskupenými zpávami o velikosti m * sqrt(p)
- Zprávy na nodech jsou znovu seskupeny tentokrát podle řádků jejich cílových nodů
- Na všech sloupcích se nezávisle provede All-to-all personalised komunikace se seskupenými zpávami o velikosti m * sqrt(p)
Cost
- První fáze je totožná s ringem se sqrt(p) procesory tj. (t_s + t_w * m * p / 2)*(sqrt(p) - 1)
- Druhá fáze je cenově shodná s první

- Čas pro seskupení je výrazně menší než komunikační čas
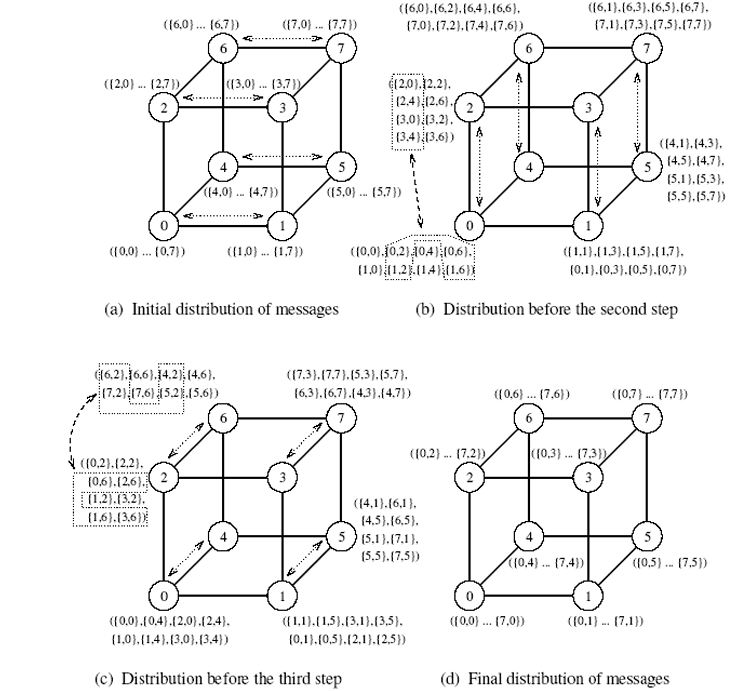
Hypercube
- Zobecnění mesh algoritmu na log(p) kroků
- V každém kroku all-to-all pernoslized komunikace drží každý node p zpráv o velikosti m
- Během komunikace v dané dimensi pošle zašle každý node p/2 zpráv jako jednu seskupenou zprávu
- Před každým dalším krokem musí znovu provést seskupení zpráv
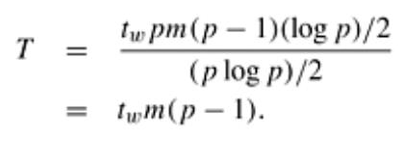
Cost
- Máme log(p) iterací a m * p / 2 iterací

- Toto není optimální!
- Každý z p nodů posílá a přijímá m * (p-1) slov, průměrná vzdálenost na hypercube mezi dvěma nody je log(p) / 2 a nachází se zde (p * log(p) / 2) spojení
Optimální algoritmus
- Každý node provede p - 1 komunikaních kroků a vymění si m slov s jiným nodem v každém kroku
- Node si vybírá protistranu komunikace v každém kroku tak, aby nedošlo k zahlcení sítě
- V j-tém kroku si node i vymění zprávy s nodem i XOR j
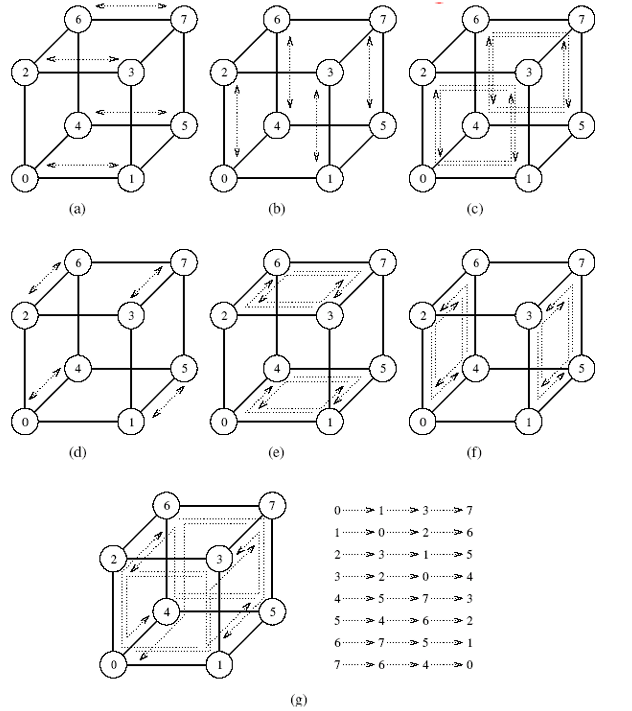
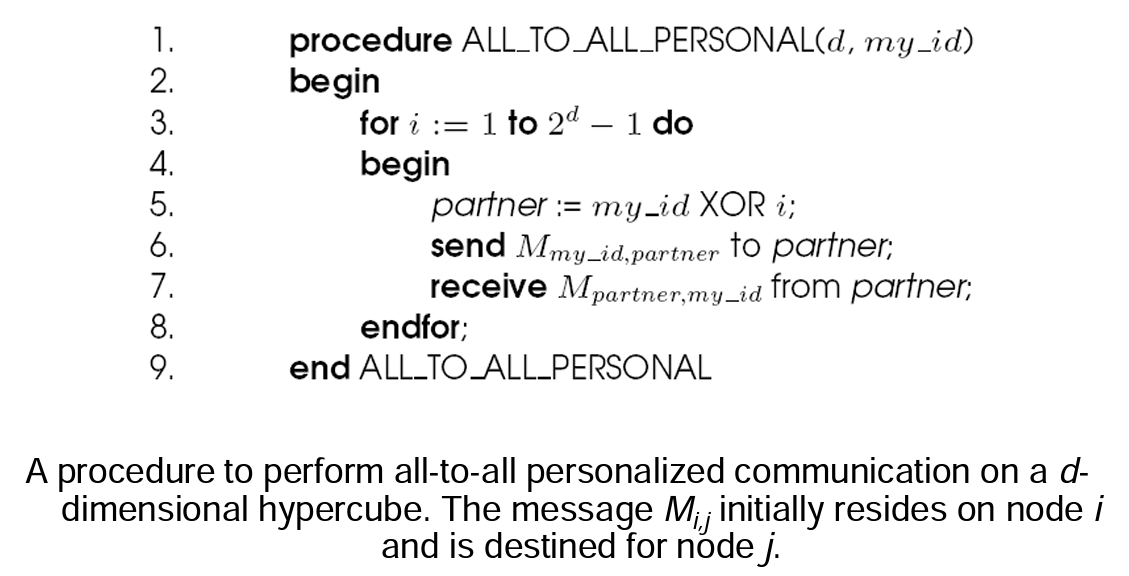
Cost
- Dochází k p - 1 krokům
- V každém kroku se přenese m slov bez zahlcení
- Optimální ve velikosti zprávy
Circular shift
- Permutace, ve kterém i-tý node pošle zprávu nodu (i + q) mod p
- 0 <= q <= p
Ring
- Lze provést v min{p, q-p} komunikacích se sousedem
Mesh
- Všechny nody pošlou zprávu sousedovi v jednom směru a následně i v druhém směru

Hypercube
TODO
Summary
Analytical model
- Sekvenční algoritmy
- Vyhodnocujeme asymptotickou dobu běhu nezávisle na platformě
- Doba běhu je závislá na velikosti vtupu
- Paralelní algoritmy
- Vyhodnocujeme dobu běhu v závislosti na platformě
- Doba běhu je závislá na velikosti vstupu, počtu procesorů a komunikačních parametrech
- Dva-krát tolik procesorů neznamená dvakrát rychlejší běh <= overheads (komunikace, idling, zahlcení sítě, atd.)
Metriky
Execution time
- Sériové algoritmy
- Doba běhu algoritmu od začátku do konce
- Značíme TS
- Paralelní algortimy
- Doba běhu od začátku práce prvního procesoru do skončení posledního procesoru
- Značíme TP
Total Parallel Overhead
- Tall = p * Tp Celkový čas všech procesorů
- Celkový overhead
- Čas strávený všemi procesory na neužitečné práci
- Značíme To
- To = Tall - TS = p * TP - TS
Speedup
- Poměr mezi časem strávený sériovým algoritmem a paralelním algoritmem s p stejnými procesory
- Pro jeden problém může existovat více různě výkoných (asymptociká složitost) sériových algoritmů s rozdílou mírou možné paralelizace
- Pro výpočet speedupu používáme vždy nevýkonější možný
- Speed může být nejméně 0 - parallení program nedoběhne
- Teorticky může být speedup maximálně p - tj. nemůžeme zrychlit o víc než kolik přiřadíme výpočetních jednotek
- V praxi toto ale neplatí - jeden procesor může strávit výpočetem méně než TS / p = superlinear speedup
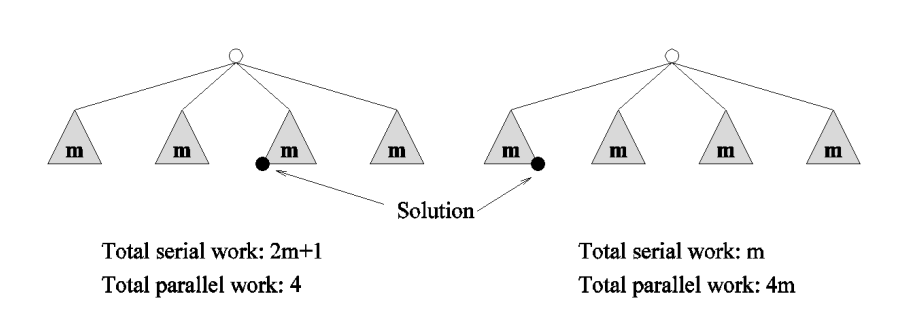
Superlinear speedup
- Paralelní algoritmus může ve výsledku odvést méně práce než jeho sériový protějšek
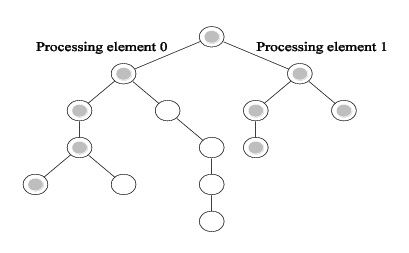
- Příklad: Hledání prvku ve stromu pomocí DFS
- Hledáme prvek nejvíce v pravo dole
- Sériový program prohledá celý strom
- Paralelní rozdělí práci na dva podstromy mezi dva procesory a zastaví se dříve, než je prohledán celý strom = méně práce
Amdahl’s Law
- Každý algoritmus obsahuje část, která je
- Přirozeně sekvenční β
- Přirozeně paralelní (1 - β)
- Speedup je limitován přirozeně sekvenční částí
- Amdahl’s Law definije maximální možný teoretický speedup (ignoruje overhead a cenu komunikace)
- Sériová část je spočtena jako β * TS
- Paralelní část je spočtena jako (1-β) * TS / p
- Z toho plyne, že TP = β * TS + (1-β) * TS / p
- Pro speedup potom platí:
Efficiency
- Poměr času, kdy je procesor efektivně vytížen
Cost
- Suma času, po kterou procesory provádely výpočty
- Paralelní systému je cost optimal, pokud je cost řešení problému na paralelním počítači asymptoticky shodný se sériovým costem
- Protože
je pro cost optimal systémy
Efekt granuality na výkon
- Velmi často menší množství přidělených procesorů zvyšuje výkon paralelního systému
- Scalling down - přidělení menšího než maximálního možného množství procesorů pro paralelní algoritmus
- Scalling down - naivní implementace = V původním případě považujeme všechny procesory jako virtuální procesory a ty přidělíme na “scaled-down” procesory
- Vzhledem k tomu že se množství procesních elemtnů snížilo o n / p, výpočty na zbylých procesorech se zvýší o n / p
- Cena komunikace mezi procesory se však nezvýší o tento faktor, protože některé virutální procesory přiřazené na stejný procesor spolu mohou komunikovat “zdarma” - toto je základní důvod zrychlení při snížení granuality
Scalability of Parallel Systems
- Jak můžeme extrapolovat data o výkonu z malých problémů a systémů na velké problémy a systémy?
Scaling Characteristics
- Víme, že
- Celková funkce overheadu To je roustoucí funkcí p
- Pro danou velikost problému (tj. TS se nemění), jakmile zvýšíme počet procesorů p, To roste a celková efektivita algoritmu klesá
- To platí vdžy
- Funkce To je funkcí jak velikost problému (n -> TS), tak počtu procesorů p
- V mnohda případech roste To sublineárně vzhledem k TS
- V takových případech roste efektivita když je zvětšeno n při zachování počtu procesorů p
- To znamená že můžeme společně zvětšovat velikost problému n společně počtem proceosrů p při zachování kontantní efektivity
- Tyto systémy nazýváme scalable
- Scalability a cost-effectivity jsou propojené veličiny
- Scalable systém může být vždy učiněn cost-optimal (Θ(1)), když vybereme správně počet procesorů p vzhledem k velikosti problému
- Když pro stejnou velikost problému zvyšujeme počet procesorů p => efektivita klesá
Isoefficiency
- Jaký je poměr zvětšení velikosti problému k počtu procesorů aby zůstala efektivita fixní?
- Tento poměr určuje škálovatelnost systému
- Čím “pomalejší”, tím lepší
- W - počet operací v nejlepším sériovém algoritmu